The Mac Pro Review (Late 2013)
by Anand Lal Shimpi on December 31, 2013 3:18 PM ESTGPU Choices
The modern Apple is a big fan of GPU power. This is true regardless of whether we’re talking about phones, tablets, notebooks or, more recently, desktops. The new Mac Pro is no exception as it is the first Mac in Apple history to ship with two GPUs by default.
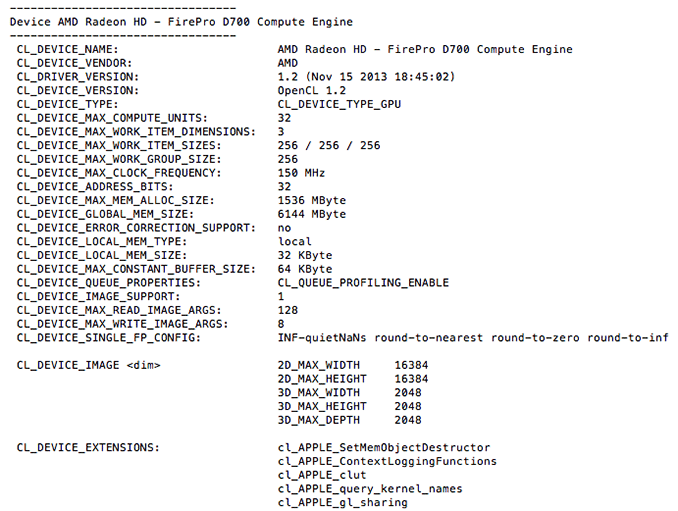
AMD won the contract this time around. The new Mac Pro comes outfitted with a pair of identical Pitcairn, Tahiti LE or Tahiti XT derived FirePro branded GPUs. These are 28nm Graphics Core Next 1.0 based GPUs, so not the absolute latest tech from AMD but the latest of what you’d find carrying a FirePro name.
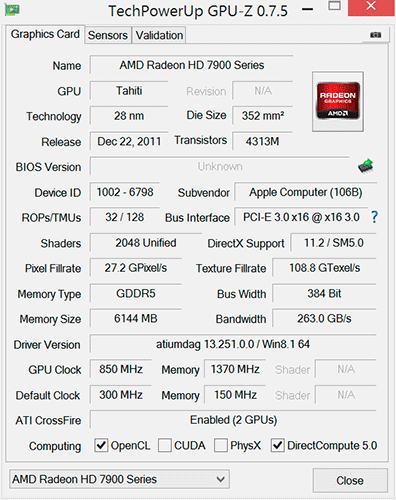
The model numbers are unique to Apple. FirePro D300, D500 and D700 are the only three options available on the new Mac Pro. The D300 is Pitcairn based, D500 appears to use a Tahiti LE with a wider 384-bit memory bus while D700 is a full blown Tahiti XT. I’ve tossed the specs into the table below:
| Mac Pro (Late 2013) GPU Options | ||||||
| AMD FirePro D300 | AMD FirePro D500 | AMD FirePro D700 | ||||
| SPs | 1280 | 1536 | 2048 | |||
| GPU Clock (base) | 800MHz | 650MHz | 650MHz | |||
| GPU Clock (boost) | 850MHz | 725MHz | 850MHz | |||
| Single Precision GFLOPS | 2176 GFLOPS | 2227 GFLOPS | 3481 GFLOPS | |||
| Double Precision GFLOPS | 136 GFLOPS | 556.8 GFLOPS | 870.4 GFLOPS | |||
| Texture Units | 80 | 96 | 128 | |||
| ROPs | 32 | 32 | 32 | |||
| Transistor Count | 2.8 Billion | 4.3 Billion | 4.3 Billion | |||
| Memory Interface | 256-bit GDDR5 | 384-bit GDDR5 | 384-bit GDDR5 | |||
| Memory Datarate | 5080MHz | 5080MHz | 5480MHz | |||
| Peak GPU Memory Bandwidth | 160 GB/s | 240 GB/s | 264 GB/s | |||
| GPU Memory | 2GB | 3GB | 6GB | |||
| Apple Upgrade Cost (Base Config) | - | +$400 | +$1000 | |||
| Apple Upgrade Cost (High End Config) | - | - | +$600 | |||
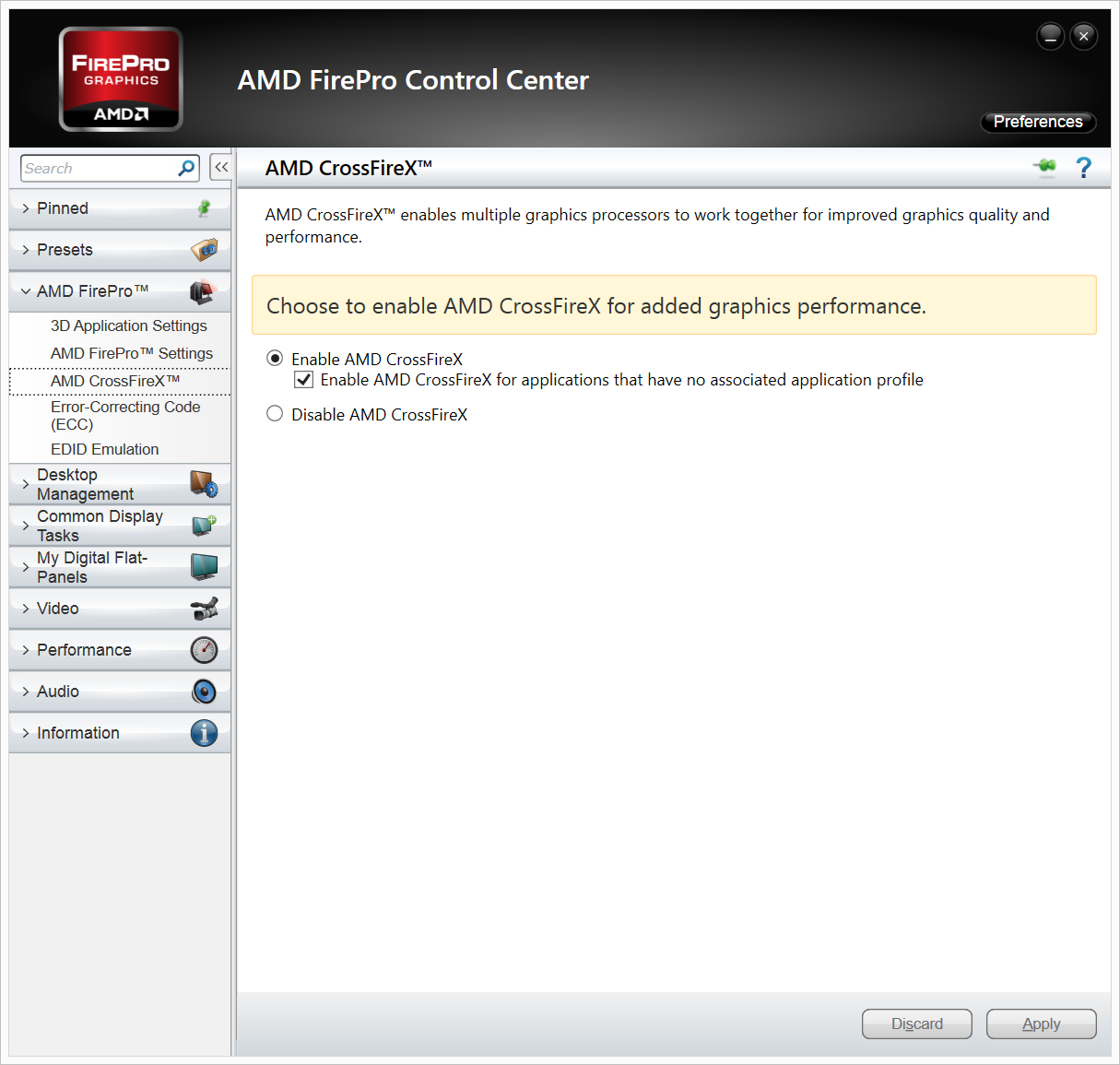
Despite the FirePro brand, these GPUs have at least some features in common with their desktop Radeon counterparts. FirePro GPUs ship with ECC memory, however in the case of the FirePro D300/D500/D700, ECC isn’t enabled on the GPU memories. Similarly, CrossFire X isn’t supported by FirePro (instead you get CrossFire Pro) but in the case of the Dx00 cards you do get CrossFire X support under Windows.
Each GPU gets a full PCIe 3.0 x16 interface to the Xeon CPU via a custom high density connector and flex cable on the bottom of each GPU card in the Mac Pro. I believe Apple also integrated CrossFire X bridge support over this cable.
With two GPUs standard in every Mac Pro configuration, there’s obviously OS support for the configuration. Under Windows, that amounts to basic CrossFire X support. Apple’s Boot Camp drivers ship with CFX support, and you can download the latest Catalyst drivers directly from AMD and enable CFX under Windows as well. I did the latter and found that despite the option being there I couldn’t actually disable CrossFire X under Windows. Disabling CFX would drop power consumption, but I didn't always see a corresponding decrease in performance.
Under OS X the situation is a bit more complicated. There is no system-wide CrossFire X equivalent that will automatically split up rendering tasks across both GPUs. By default, one GPU is setup for display duties while the other is used exclusively for GPU compute workloads. GPUs are notoriously bad at context switching, which can severely limit compute performance if the GPU also has to deal with the rendering workloads associated with display in a modern OS. NVIDIA sought to address a similar problem with their Maximus technology, combining Quadro and Tesla cards into a single system for display and compute.
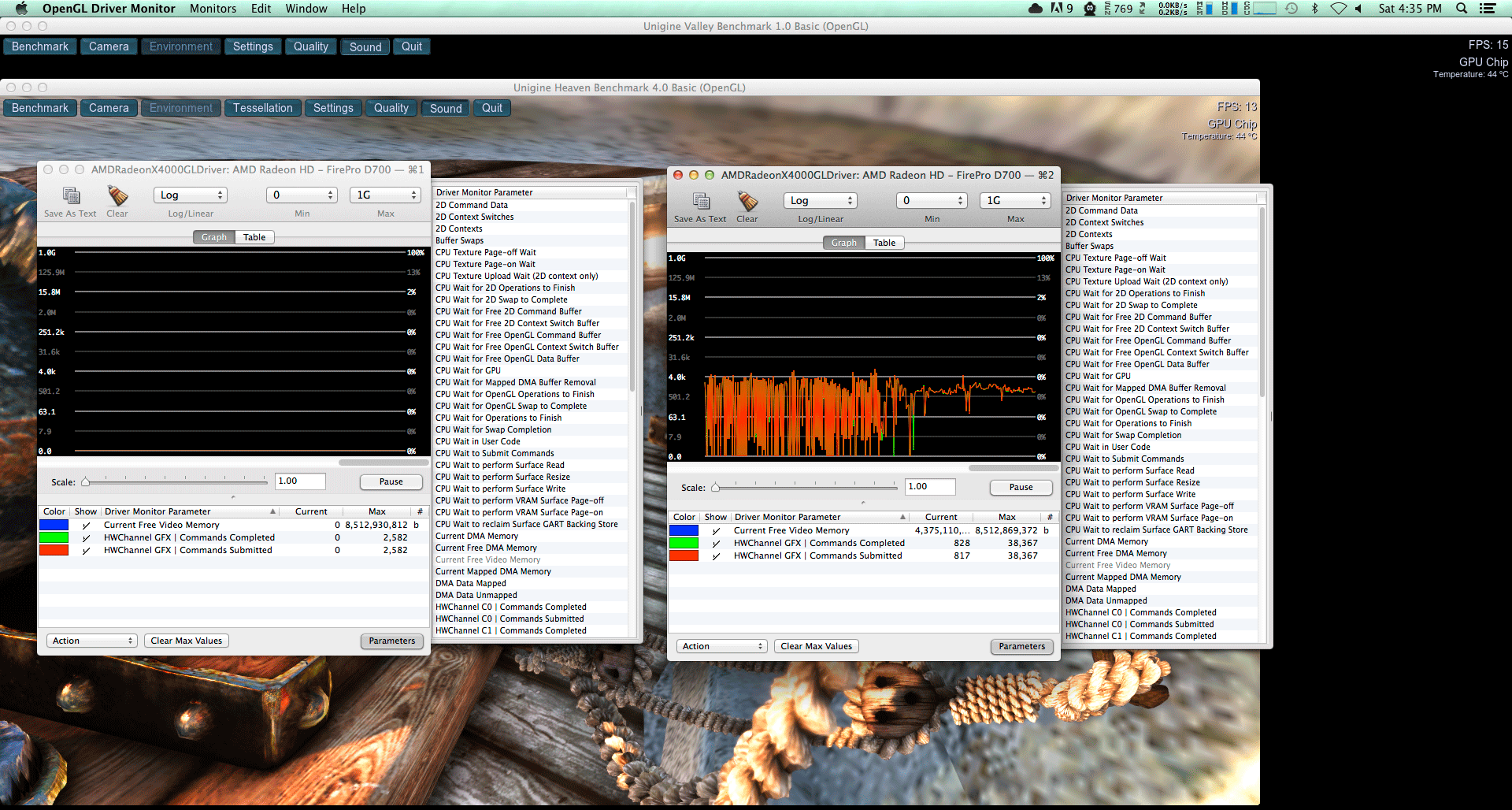
Due to the nature of the default GPU division under OS X, all games by default will only use a single GPU. It is up to the game developer to recognize and split rendering across both GPUs, which no one is doing at present. Unfortunately firing up two instances of a 3D workload won’t load balance across the two GPUs by default. I ran Unigine Heaven and Valley benchmarks in parallel, unfortunately both were scheduled on the display GPU leaving the compute GPU completely idle.
The same is true for professional applications. By default you will see only one GPU used for compute workloads. Just like the gaming example however, applications may be written to spread compute workloads out across both GPUs if they need the horsepower. The latest update to Final Cut Pro (10.1) is one example of an app that has been specifically written to take advantage of both GPUs in compute tasks.
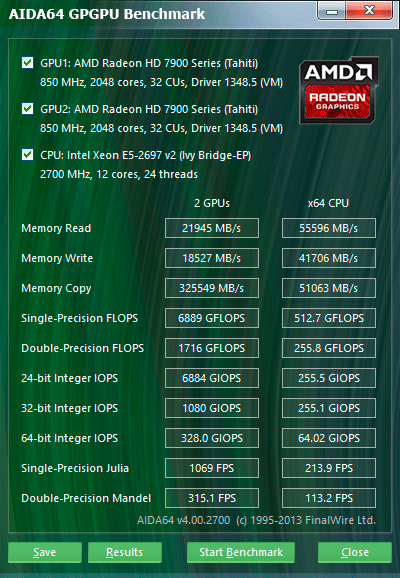
The question of which GPU to choose is a difficult one. There are substantial differences in performance between all of the options. The D700 for example offers 75% more single precision compute than the D300 and 56% more than the D500. All of the GPUs have the same number of render backends however, so all of them should be equally capable of driving a 4K display. In many professional apps, the bigger driver for the higher end GPU options will likely be the larger VRAM configurations.
![]()
I was particularly surprised by how much video memory Final Cut Pro appeared to take up on the primary (non-compute) GPU. I measured over 3GB of video memory usage while on a 1080p display, editing 4K content. The D700 is the only configuration Apple offers with more than 3GB of video memory. I’m not exactly sure how the experience would degrade if you had less, but throwing more VRAM at the problem doesn’t seem to be a bad idea. The compute GPU’s memory usage is very limited (obviously) until the GPU is actually in use. OS X reported ~8GB of usage when idle, which I can only assume is a bug and a backwards way of saying that none of the memory was in use. Under a GPU compute load (effects rendering in FCP), I saw around 2GB of memory usage on the compute GPU.
Since Final Cut Pro 10.1 appears to be a flagship app for the Mac Pro’s CPU + GPU configuration, I did some poking around to see how the three separate processors are used in the application. Basic rendering still happens on the CPU. With 4K content and the right effects I see 20 - 21 threads in use, maxing out nearly all available cores and threads. I still believe the 8-core version may be a slightly better choice if you're concerned about cost, but that's a guess on my part since I don't have a ton of 4K FCP 10.1 projects to profile. The obvious benefit to the 12-core version is you get more performance when the workload allows it, and when it doesn't you get a more responsive system.
Live preview of content that has yet to be rendered is also CPU bound. I don’t see substantial GPU compute use here, and the same is actually true for the CPU. Scrubbing through and playing back non-rendered content seems to use between 1 - 3 CPU cores. Even if you apply video effects to the project, prior to rendering this ends up being a predominantly CPU workload with the non-compute (display) GPU spending some cycles.
It’s when you actually go to render visual effects that the compute GPU kicks in. Video rendering/transcoding, as I mentioned earlier, is still a CPU bound affair but all effects rendering takes place on the GPUs. The GPU workload increases depending on the number of effects layered upon one another. Effects rendering appears to be spread over both GPUs, with the compute GPU taking the brunt of the workload in some cases and in others the two appear more balanced.
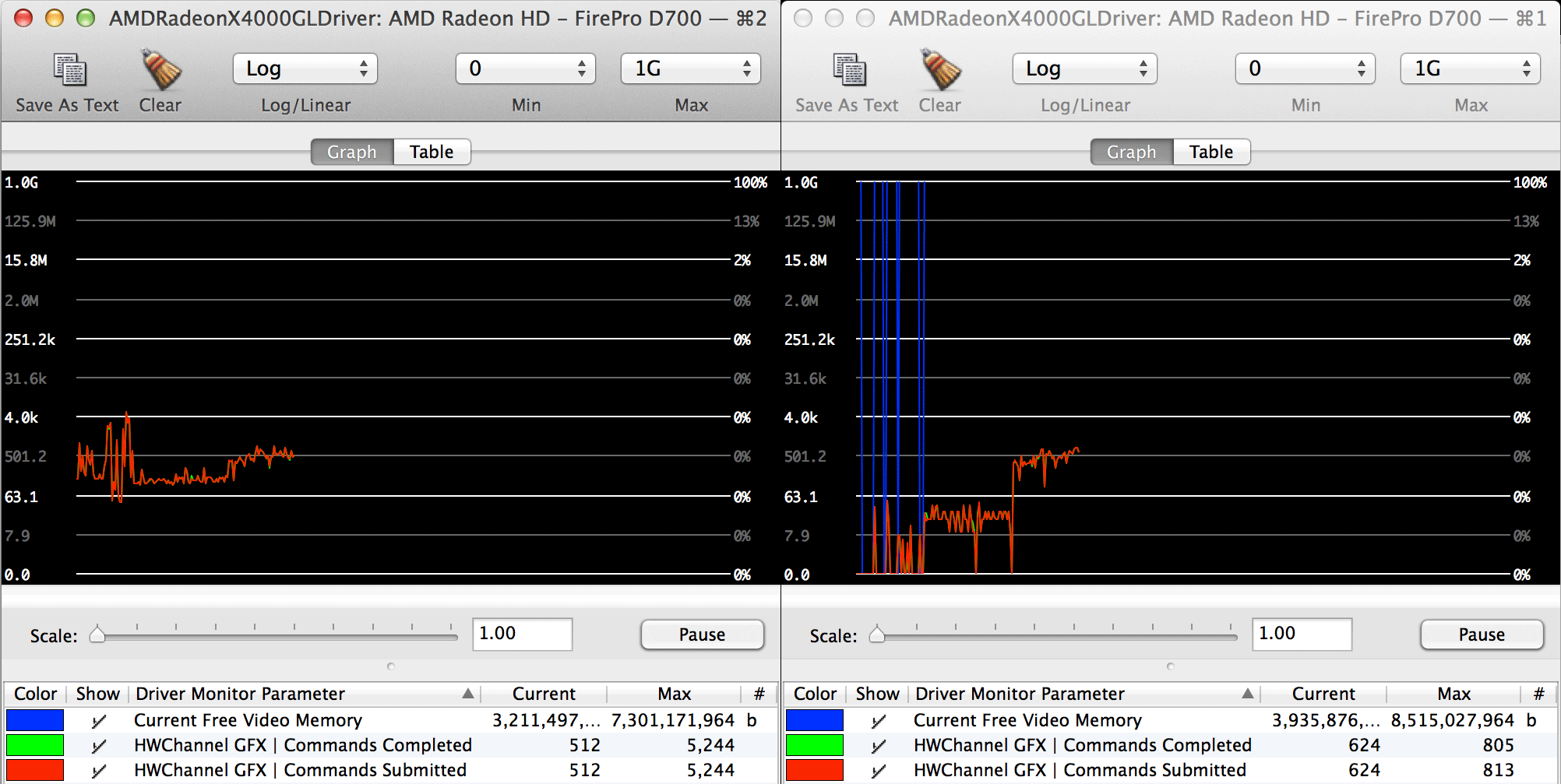
GPU load while running my 4K CPU+GPU FCP 10.1 workload
Final Cut Pro’s division of labor between CPU and GPUs exemplifies what you’ll need to see happen across the board if you want big performance gains going forward. If you’re not bound by storage performance and want more than double digit increases in performance, your applications will have to take advantage of GPU computing to get significant speedups. There are some exceptions (e.g. leveraging AVX hardware in the CPU cores), but for the most part this heterogeneous approach is what needs to happen. What we’ve seen from FCP shows us that the solution won’t come in the form of CPU performance no longer mattering and GPU performance being all we care about. A huge portion of my workflow in Final Cut Pro is still CPU bound, the GPU is used to accelerate certain components within the application. You need the best of both to build good, high performance systems going forward.








267 Comments
View All Comments
uhuznaa - Wednesday, January 1, 2014 - link
For whatever it's worth: I'm supporting a video pro and what I can see in that crowd is that NOBODY cares for internal storage. Really. Internal storage is used for the software and of course the OS and scratch files and nothing else. They all use piles of external drives which are much closer to actual "media" you can carry around and work with in projects with others and archive.I fact I tried for a while to convince him of the advantages of big internal HDDs and he wouldn't have any of it. He found the flood of cheap USB drives you can even pick up at the gas station in the middle of the night the best thing to happen and USB3 a gift from heaven. They're all wired this way. Compact external disks that you can slap paper labels on with the name of the project on it and the version of that particular edit and that you can carry around are the best thing since sliced bread for them. And after a short while I had to agree that they're perfectly right with that for what they do.
Apple is doing this quite right. Lots of bays are good for servers, but this is not a server. It's a workstation and work here means mostly work with lots of data that wants to be kept in nice little packages you can plug in and safely out and take with you or archive in well-labeled shelves somewhere until you find a use for it later on.
(And on a mostly unrelated note: Premiere Pro may be the "industry standard" but god does this piece of software suck gas giants through nanotubes. It's a nightmarish UI thinly covering a bunch of code held together by chewing gum and duct tape. Apple may have the chance of a snowflake in hell against that with FCP but they absolutely deserve kudos for trying. I don't know if I love Final Cut, but I know I totally hate Premiere.)
lwatcdr - Wednesday, January 1, 2014 - link
"My one hope is that Apple won’t treat the new Mac Pro the same way it did its predecessor. The previous family of systems was updated on a very irregular (for Apple) cadence. "This is the real problem. Haswell-EP will ship this year and it used a new socket. The proprietary GPU physical interface will mean those will probably not get updates quickly and they will be expensive. Today the Pro is a very good system but next year it will be falling behind.
boli - Wednesday, January 1, 2014 - link
Hi Anand, cheers for the enjoyable and informative review.Regarding your HiDPI issue, I'm wondering if this might be an MST issue? Did you try in SST mode too?
Just wondering because I was able to add 1920x1080 HiDPI to my 2560x1440 display no problem, by adding a 3840x2160 custom resolution to Switch Res X, which automatically added 1920x1080 HiDPI to the available resolutions (in Switch Res X).
mauler1973 - Wednesday, January 1, 2014 - link
Great review! Now I am wondering if I can replicate this kind of performance in a hackintosh.Technology Never Sleeps - Wednesday, January 1, 2014 - link
Good article but I would suggest that your editor or proof reader review your article before its posted. It takes away from the professional nature of the article and website with so many grammatical errors.Barklikeadog - Wednesday, January 1, 2014 - link
Once again, a standard 2009 model wouldn't fair nearly as well here. Even with a Radeon HD 4870 I bet we'd be seeing significantly lower performance.Great review Anand, but I think you meant fare in that sentence.
name99 - Wednesday, January 1, 2014 - link
" Instead what you see at the core level is a handful of conservatively selected improvements. Intel requires that any new microarchitectural feature introduced has to increase performance by 2% for every 1% increase in power consumption."What you say is true, but not the whole story. It implies that these sorts of small improvements are the only possibility for the future and that's not quite correct.
In particular branch prediction has become good enough that radically different architectures (like CFP --- Continuous Flow Processing --- become possible). The standard current OoO architecture used by everyone (including IBM for both POWER and z, and the ARM world) grew from a model based on no speculation to some, but imperfect, speculation. So what it does is collect speculated results (via the ROB and RAT) and dribble those out in small doses as it becomes clear that the speculation was valid. This model never goes drastically off the rails, but is very much limited in how many OoO instructions it can process, both at the complete end (size of the ROB, now approaching 200 fused µ-instructions in Haswell) and at the scheduler end (trying to find instructions that can be processed because their inputs are valid, now approaching I think about 60 instructions in Haswell).
These figures give us a system that can handle most latencies (FP instructions, divisions, reasonably long chains of dependent instructions, L1 latency, L2 latency, maybe even on a good day L3 latency) but NOT memory latency.
And so we have reached a point where the primary thing slowing us down is data memory latency. This has been a problem for 20+ years, but now it's really the only problem. If you use best of class engineering for your other bits, really the only thing that slows you down is waiting on (data) memory. (Even waiting on instructions should not ever be a problem. It probably still is, but work done in 2012 showed that the main reason instruction prefetching failed was that the prefetched was polluted by mispredicted branches and interrupts. It's fairly easy to filter both of these once you appreciate the issue, at which point your I prefetcher is basically about 99.5% accurate across a wide variety of code. This seems like such an obvious an easy win that I expect it to move into all the main CPUs within 5 yrs or so.)
OK, so waiting on memory is a problem. How do we fix it?
The most conservative answer (i.e. requires the fewest major changes) is data pre fetchers, and we've had these growing in sophistication over time. They can now detect array accesses with strides across multiple cache lines, including backwaters, and we have many (at least 16 on Intel) running at the same time. Each year they become smarter about starting earlier, ending earlier, not polluting the cache with unneeded data. But they only speed up regular array accesses.
Next we have a variety of experimental prefetchers that look for correlations in the OFFSETs of memory accesses; the idea being that you have things like structs or B-tree nodes that are scattered all over memory (linked by linked lists or trees or god knows what), but there is a common pattern of access once you know the base address of the struct. Some of these seem to work OK, with realistic area and power requirements. If a vendor wanted to continue down the conservative path, this is where they would go.
Next we have a different idea, runahead execution. Here the idea is that when the “real” execution hits a miss to main memory, we switch to a new execution mode where no results will be stored permanently (in memory or in registers); we just run ahead in a kind of fake world, ignoring instructions that depend on the load that has missed. The idea is that, during this period we’ll trigger new loads to main memory (and I-cache misses). When the original miss to memory returns its result, we flush everything and restart at the original load, but now, hopefully, the runahead code started some useful memory accesses so that data is available to us earlier.
There are many ways to slice this. You can implement it fairly easily using SMT infrastructure if you don’t have a second thread running on the core. You can do crazy things that try to actually preserve some of the results you generate during the runahead phase. Doing this naively you burn a lot of power, but there are some fairly trivial things you can do to substantially reduce the power.
In the academic world, the claim is that for a Nehalem type of CPU this gives you about a 20% boost at the cost of about 5% increased power.
In the real world it was implemented (but in a lousy cheap-ass fashion) on the POWER6 where it was underwhelming (it gave you maybe a 2% boost over the existing prefetchers); but their implementation sucked because it only ran 64 instructions during the run ahead periods. The simulations show that you generate about one useful miss to main memory per 300 instructions executed, so maybe two or three during a 400 to 500 cycles load miss to main memory, but 64 is just too short.
It was also supposed to be implemented in the SUN Rock processor which was cancelled when Oracle bought Sun. Rock tried to be way more ambitious in their version of this scheme AND suffered from a crazy instruction fetch system that had a single fetch unit trying to feed eight threads via round robin (so each thread gets new instructions every eight cycles).
Both these failures don’t, I think, tell us if this would work well if implemented on, say, an ARM core rather than adding SMT.
Which gets us to SMT. Seems like a good idea, but in practice it’s been very disappointing, apparently because now you have multiple threads fighting over the same cache. Intel, after trying really hard, can’t get it to give more than about a 25% boost. IBM added 4 SMT threads to POWER7, but while they put a brave face on it, the best the 4 threads give you is about 2x single threaded performance. Which, hey, is better than 1x single threaded performance, but it’s not much better than what they get from their 2 threaded performance (which can do a lot better than Intel given truly massive L3 caches to share between threads).
But everything so far is just add-ons. CFP looks at the problem completely differently.
The problem we have is that the ROB is small, so on a load miss it soon fills up completely. You’d want the ROB to be about 2000 entries in size and that’s completely impractical. So why do we need the ROB? To ensure that we write out updated state properly (in small dribs and drabs every cycle) as we learn that our branch prediction was successful.
But branch prediction these days is crazy accurate, so how about a different idea. Rather than small scale updating successful state every cycle, we do a large scale checkpoint every so often, generally just before a branch that’s difficult to predict. In between these difficult branches, we run out of order with no concern for how we writeback state — and in the rare occasions that we do screw up, we just roll back to the checkpoint. In between difficult branches, we just run on ahead even across misses to memory — kinda like runahead execution, but now really doing the work, and just skipping over instructions that depend on the load, which will get their chance to run (eventually) when the load completes.
Of course it’s not quite that simple. We need to have a plan for being able to unwind stores. We need a plan for precise interrupts (most obviously for VM). But the basic idea is we trade today’s horrible complexity (ROB and scheduler window) for a new ball of horrible complexity that is not any simpler BUT which handles the biggest current problem, that the system grinds to a halt at misses to memory, far better than the current scheme.
The problem, of course, is that this is a hell of a risk. It’s not just the sort of minor modification to your existing core where you know the worst that can go wrong; this is a leap into the wild blue yonder on the assumption that your simulations are accurate and that you haven’t forgotten some show-stopping issue.
I can’t see Intel or IBM being the first to try this. It’s the sort of thing that Apple MIGHT be ambitious enough to try right now, in their current state of so much money and not having been burned by a similar project earlier in their history. What I’d like to see is a university (like a Berkeley/Stanford collaboration) try to implement it and see what the real world issues are. If they can get it to work, I don’t think there’s a realistic chance of a new SPARC or MIPS coming out of it, but they will generate a lot of valuable patents, and their students who worked on the project will be snapped up pretty eagerly by Intel et al.
stingerman - Wednesday, January 1, 2014 - link
I think Intel has another two years left on the Mac. Apple will start phasing it out on the MacBook Air, Mac Mini and iMac. The MacBook rPros and finally the Mac Pro. Discreet x86 architecture is dead ending. Apple's going to move their Macs to SOC that they design. It will contain most of the necessary components and significantly reduce the costs of the desktops and notebooks. The Mac Pro will get it last giving time for the Pro Apps to be ported to Apple's new mobile and desktop 64-bit processors.tahoey - Wednesday, January 1, 2014 - link
Remarkable work as always. Thank you.DukeN - Thursday, January 2, 2014 - link
Biased much, Anand?Here's the Lenovo S30 I bought a couple of weeks back, and no it wasn't $4000 + like you seem to suggest.
http://www.cdw.com/shop/products/Lenovo-ThinkStati...
You picked probably the most overpriced SKU in the bunch just so you can prop up the ripoff that is your typical Apple product.
Shame.