AMD’s Jaguar Architecture: The CPU Powering Xbox One, PlayStation 4, Kabini & Temash
by Anand Lal Shimpi on May 23, 2013 12:00 AM EST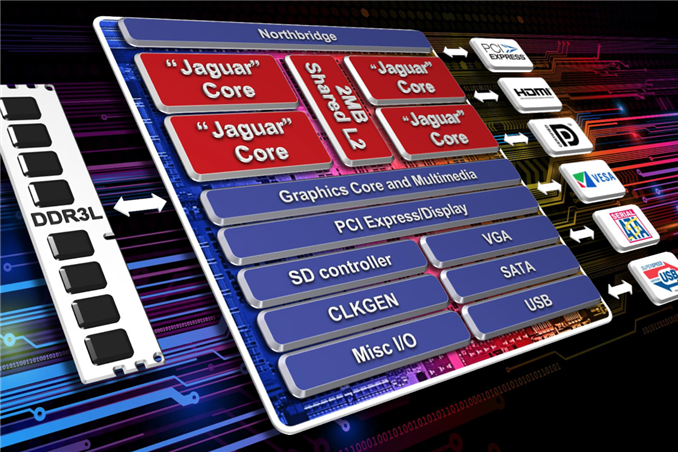
Microprocessor architectures these days are largely limited, and thus defined, by power consumption. When it comes to designing an architecture around a power envelope the rule of thumb is any given microprocessor architecture can scale to target an order of magnitude of TDPs. For example, Intel’s Core architectures (Sandy/Ivy Bridge) effectively target the 13W - 130W range. They can surely be used in parts that consume less or more power, but at those extremes it’s more efficient to build another microarchitecture to target those TDPs instead.
Both AMD and Intel feel similarly about this order of magnitude rule, and thus both have two independent microprocessor architectures that they leverage to build chips for the computing continuum. From Intel we have Atom for low power, and Core for high performance. In 2010 AMD gave us Bobcat for its low power roadmap, and Bulldozer for high performance.
Both the Bobcat and Bulldozer lines would see annual updates. In 2011 we saw Bobcat used in Ontario and Zacate SoCs, as a part of the Brazos platform. Last year AMD announced Brazos 2.0, using slightly updated versions of those very same Bobcat based SoCs. Today AMD officially launches Kabini and Temash, APUs based on the first major architectural update to Bobcat: the Jaguar core.






Jaguar: Improved 2-wide Out-of-Order
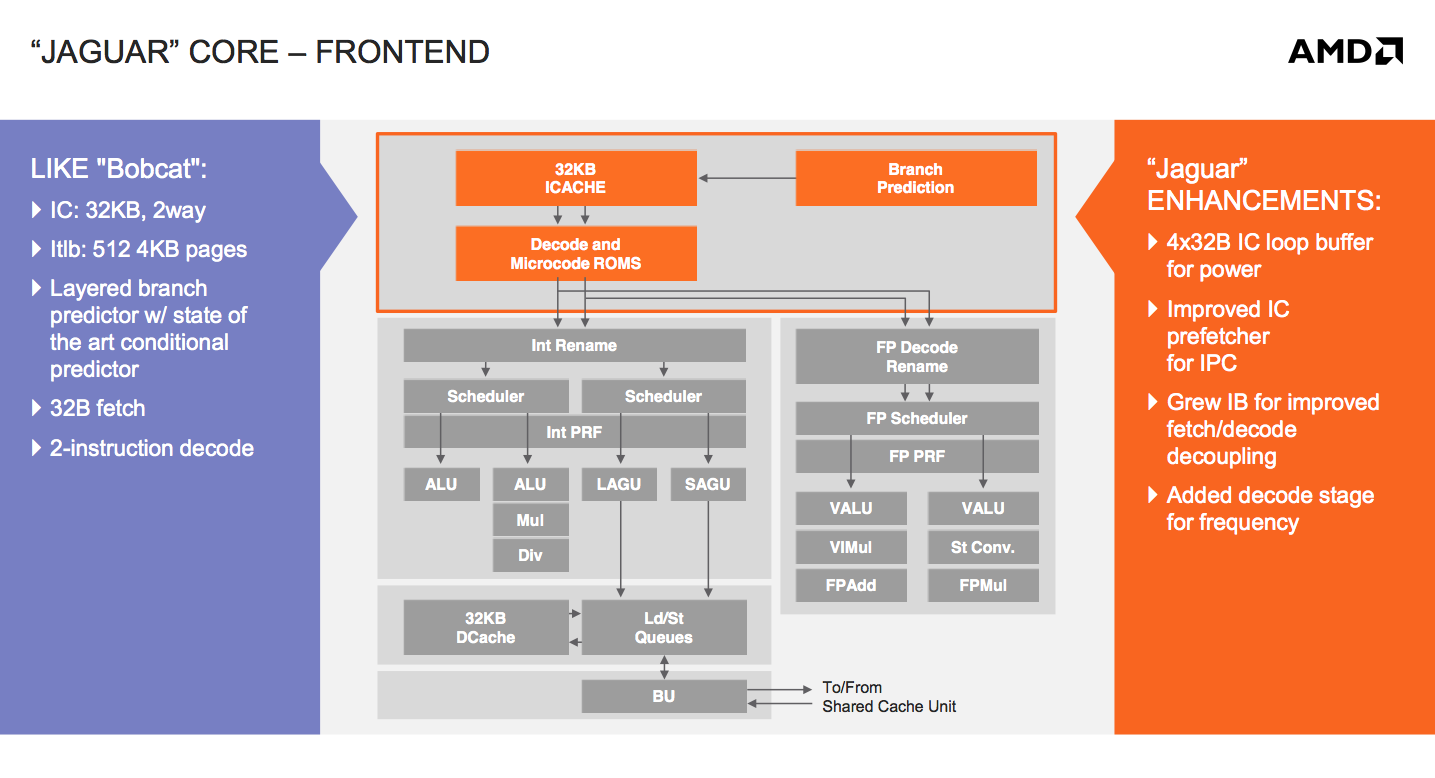
At the core-level, Jaguar still looks a lot like Bobcat. The same dual-issue, out-of-order architecture that AMD introduced in 2010 remains intact with Jaguar. The same L1 cache, front end and execution blocks are all still here. Given the ARM transition from a dual-issue, out-of-order core with Cortex A9 to a three-issue, OoO design with the Cortex A15, I expected something similar from AMD. Despite moving to a smaller manufacturing process (28nm), AMD was very focused on increasing performance within the same TDP or lower with Jaguar. The driving motivator? While Bobcat ended up in netbooks, nettops and other low cost, but thick machines, Jaguar needed to go into even thinner form factors: tablets. AMD still has no intentions of getting into the smartphone SoC space, but the Windows 8 (and Android?) tablet market is fair game. Cellular connectivity isn’t a requirement there, particularly at the lower price points, and AMD can easily be a second source alternative to Intel Atom based designs.
The average number of instructions executed per clock (IPC) is still below 1 for most client workloads. There’s a certain amount of burst traffic to be expected but given the types of dependencies you see in most use cases, AMD felt the gain from making the machine wider wasn’t worth the power tradeoff. There’s also the danger of making the cat-cores too powerful. While just making them 3-issue to begin with wouldn’t dramatically close the gap between the cat-cores and the Bulldozer family, there’s still a desire for there to be clear separation between the two microarchitectures.
The move to a three-issue design would certainly increase performance, but AMD’s tablet ambitions and power sensitivity meant it would save that transition for another day. I should point out that ARM is increasingly looking like the odd-man-out here, with both Jaguar and Intel’s Silvermont retaining the dual-issue design of their predecessors. Part of this has to do with the fact that while AMD and Intel are very focused on driving power down, ARM has aspirations of moving up in the performance/power chain.
The width of the front end is only one lever AMD could have used to increase performance. While it was a pretty big lever that AMD chose not to pull, there are other smaller levers that were exercised in Jaguar.
There’s now a 4 x 32-byte loop buffer for the instruction cache. Whenever a loop is detected, instead of fetching instructions executed in the loop from the L1 I-cache over and over again, they’re serviced from this small loop buffer. If this sounds like a trace cache or decoded micro-op cache, don’t get too excited, Jaguar’s loop buffer is neither of these things. There are no pipeline savings or powered down fetch/decode units. The only benefit to the new loop buffer is the instruction cache doesn’t have to be fired up during every iteration of a buffered loop. In other words, this is a very specific play to reduce power consumption - not to improve performance.
All microprocessors see tons of simulation work before they’re ever brought to market. Even once a design is done, additional profiling is used to identify bottlenecks, which are then prioritized for addressing in future designs. All bottleneck removal has to be vetted against power, cost and schedule constraints. Given an infinite budget across all vectors you could eliminate all bottlenecks, but you’d likely take an infinite amount of time to complete the design. Taking all of those realities into account usually means making tradeoffs, even when improving a design.
We saw the first example of a clear tradeoff when AMD stuck with a 2-issue front end for Jaguar. Not including a decoded micro-op cache and opting for a simpler loop buffer instead is an example of another. AMD likely noticed a lot of power being wasted during loops, and the addition of a loop buffer was probably the best balance of complexity, power savings and cost.
AMD also improved the instruction cache prefetcher, not because of an over abundance of bandwidth but by revisiting the Bobcat design and spending some more time on the implementation in Jaguar. The IC prefetcher improvements are simply AMD doing things better in Jaguar, not being under the same pressure to introduce a brand new architecture as was the case with Bobcat.
The instruction buffer between the instruction cache and decoders grew in size with Jaguar, a sort of half step towards the more heavily decoupled fetch/decode stages in Bulldozer.
Jaguar adds support for new instructions (SSE4.1/4.2, AES, CLMUL, MOVBE, AVX, F16C, BMI1) as well as 40-bit physical addressing.
The final change to the front of Jaguar was the addition of another decode stage, purely for frequency gains. It turns out that in Bobcat the decoder was one of the critical paths limiting maximum frequency. Adding another decode stage simply gave AMD enough wiggle room to hit their frequency targets for Jaguar at 28nm.








78 Comments
View All Comments
fluxtatic - Thursday, May 23, 2013 - link
Whoa - I think this is the first useful thing I've learned today. I've been wondering the same thing for a long time. Thanks!Ev1l_Ash - Wednesday, May 28, 2014 - link
Thanks for that quasi!Tuna-Fish - Thursday, May 23, 2013 - link
quasi was more accurate than his name implies, but just to expand on it:The count of custom macros is important because when you switch manufacturing processes, the work you have to re-do on the new process is the macros. Old cpus were "all custom macro", meaning that switching the manufacturing process meant re-doing all the physical design. A cpu that has a very limited amount of custom macros can be manufactured at different fabs without breaking the bank.
lmcd - Thursday, May 23, 2013 - link
Sorry, didn't see your post.lmcd - Thursday, May 23, 2013 - link
To suppliment quasi_accurate (as I understand) these are parts of the chip that need checked on, adjusted and corrected, and/or even replaced depending on the foundry.So, reducing these isn't a priority for Intel, but for AMD who wants portability (ability to use both GloFo and TMSC) it's a priority.
tiquio - Thursday, May 23, 2013 - link
Thanks quasi_accurate, Tuna-Fish and lmcd. Your answers were very clear.If I my understanding is correct, would it be safe to assume that Apple's A6 uses custom macros. Anand mentioned in his article that Apple used a custom layout of ARM to maximize performance. Is this one example of custom macros.
name99 - Friday, May 24, 2013 - link
You can customize a variety of things, from individual transistors (eg fast but leaky vs slow but non-leaky), to circuits, to layout.As I understand it the AMD issue is about customized vs automatic CIRCUITS. The Apple issue is about customized vs automatic LAYOUT (ie placement of items and the wiring connecting them).
Transistors are obviously most fab-specific, so you are really screwed if your design depends on them specifically (eg you can't build your finFET design at a non-finFET fab). Circuit design is still somewhat fab-specific --- you can probably get it to run on a different fab, but at lower frequency and higher power, so it's still not where you want to be. Layout, on the other hand, I don't think is very fab-specific at all (unless you do something like use 13 metal layers and then want to move to a fab than can only handle a maximum of 10 metal layers).
I'd be happy to be corrected on any of this, but I think that's the broad outline of the issues.
iwodo - Thursday, May 23, 2013 - link
Really want this to be in Servers. Storage Servers, Home based NAS, caching / front end servers etc.JohanAnandtech - Thursday, May 23, 2013 - link
agree. With a much downsized graphics core, and higher clocks for the CPU.Alex_Haddock - Thursday, May 23, 2013 - link
We will certainly have Kyoto in Moonshot :-) . http://h30507.www3.hp.com/t5/Hyperscale-Computing-...