AMD's Graphics Core Next Preview: AMD's New GPU, Architected For Compute
by Ryan Smith on December 21, 2011 9:38 PM ESTMany SIMDs Make One Compute Unit
When we move up a level we have the Compute Unit, what AMD considers the fundamental unit of computation. Whereas a single SIMD can execute vector operations and that’s it, combined with a number of other functional units it makes a complete unit capable of the entire range of compute tasks. In practice this replaces a Cayman SIMD, which was a collection of Cayman SPs. However a GCN Compute Unit is capable of far, far more than a Cayman SIMD.
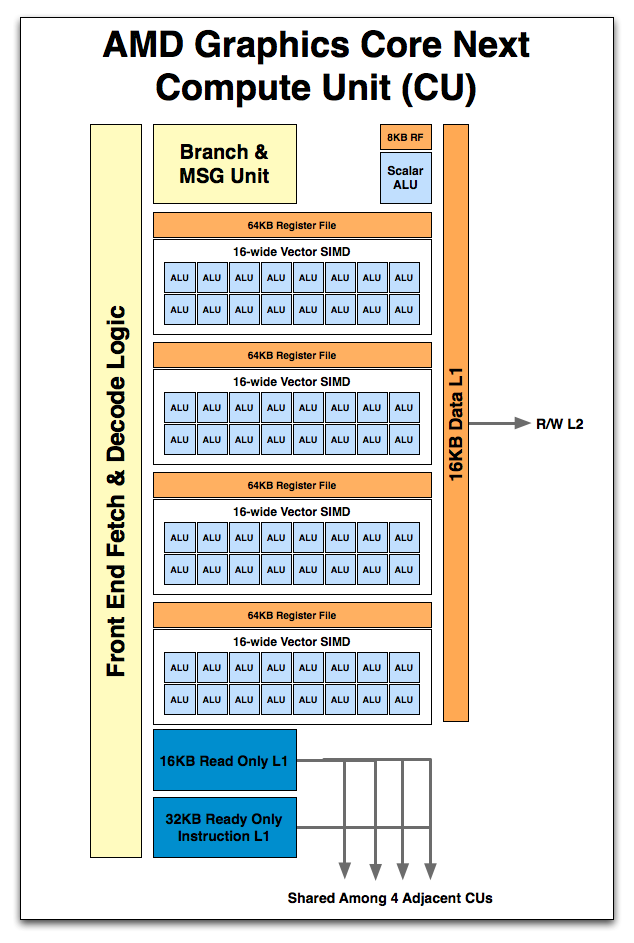
So what’s in a Compute Unit? Just as a Cayman SIMD was a collection of SPs, a Compute Unit starts with a collection of SIMDs. 4 SIMDs are in a CU, meaning that like a Cayman SIMD, a GCN CU can work on 4 instructions at once. Also in a Compute Unit is the control hardware & branch unit responsible for fetching, decoding, and scheduling wavefronts and their instructions. This is further augmented with a 64KB Local Data Store and 16KB of L1 data + texture cache. With GCN data and texture L1 are now one and the same, and texture pressure on the L1 cache has been reduced by the fact that AMD is now keeping compressed rather than uncompressed texels in the L1 cache. Rounding out the memory subsystem is access to the L2 cache and beyond. Finally there is a new unit: the scalar unit. We’ll get back to that in a bit.
But before we go any further, let’s stop here for a moment. Now that we know what a CU looks like and what the weaknesses are of VLIW, we can finally get to the meat of the issue: why AMD is dropping VLIW for non-VLIW SIMD. As we mentioned previously, the weakness of VLIW is that it’s statically scheduled ahead of time by the compiler. As a result if any dependencies crop up while code is being executed, there is no deviation from the schedule and VLIW slots go unused. So the first change is immediate: in a non-VLIW SIMD design, scheduling is moved from the compiler to the hardware. It is the CU that is now scheduling execution within its domain.
Now there’s a distinct tradeoff with dynamic hardware scheduling: it can cover up dependencies and other types of stalls, but that hardware scheduler takes up die space. The reason that the R300 and earlier GPUs were VLIW was because the compiler could do a fine job for graphics, and the die space was better utilized by filling it with additional functional units. By moving scheduling into hardware it’s more dynamic, but we’re now consuming space previously used for functional units. It’s a tradeoff.
So what can you do with dynamic scheduling and independent SIMDs that you could not do with Cayman’s collection of SPs (SIMDs)? You can work around dependencies and schedule around things. The worst case scenario for VLIW is that something scheduled is completely dependent or otherwise blocking the instruction before and after it – it must be run on its own. Now GCN is not an out-of-order architecture; within a wavefront the instructions must still be executed in order, so you can’t jump through a pixel shader program for example and execute different parts of it at once. However the CU and SIMDs can select a different wavefront to work on; this can be another wavefront spawned by the same task (e.g. a different group of pixels/values) or it can be a wavefront from a different task entirely.
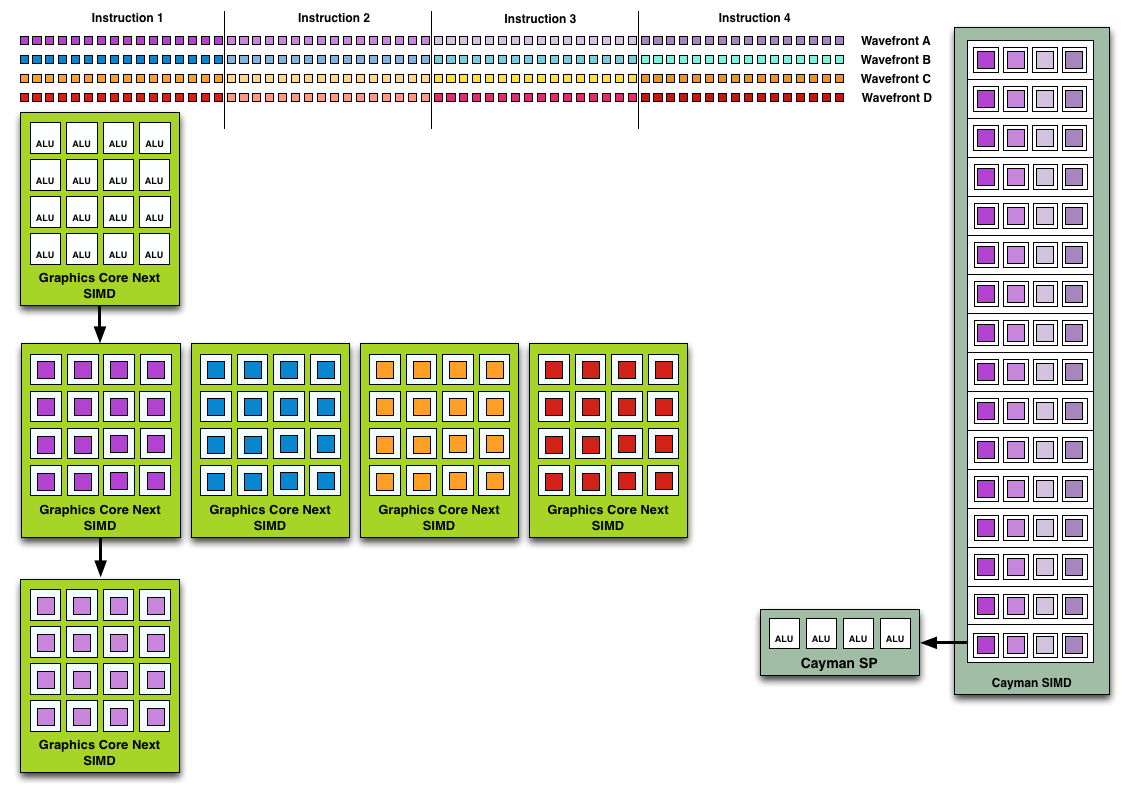
Wavefront Execution Example: SIMD vs. VLIW. Not To Scale - Wavefront Size 16
Cayman had a very limited ability to work on multiple tasks at once. While it could consume multiple wavefronts from the same task with relative ease, its ability to execute concurrent tasks was reliant on the API support, which was limited to an extension to OpenCL. With these hardware changes, GCN can now concurrently work on tasks with relative ease. Each GCN SIMD has 10 wavefronts to choose from, meaning each CU in turn has up to a total of 40 wavefronts in flight. This in a nutshell is why AMD is moving from VLIW to non-VLIW SIMD for Graphics Core Next: instead of VLIW slots going unused due to dependencies, independent SIMDs can be given entirely different wavefronts to work on.
As a consequence, compiling also becomes much easier. With the compiler freed from scheduling tasks, compilation behaves in a rather standard manner, since most other architectures are similarly scheduled in hardware. Writing a compiler still isn’t absolutely easy, but when it comes to optimizing the execution of a program the compiler can focus on other matters, making it much easier for other languages to target GCN. In fact without the need to generate long VLIW instructions or to including scheduling information, the underlying ISA for GCN is also much simpler. This makes debugging much easier since the code generated reflects the fact that scheduling is now done in hardware, which is reflected in our earlier assembly code example.
Now while leaving behind the drawbacks of VLIW is the biggest architectural improvement for compute performance coming from Cayman, the move to non-VLIW SIMDs is not the only benefit. We still have not discussed the final component of the CU: the Scalar ALU. New to GCN, the Scalar unit serves to further keep inefficient operations out of the SIMDs, leaving the vector ALUs on the SIMDs to execute instructions en mass. The scalar unit is composed of a single scalar ALU, along with an 8KB register file.
So what does a scalar unit do? First and foremost it executes “one-off” mathematical operations. Whole groups of pixels/values go through the vector units together, but independent operations go to the scalar unit as to not waste valuable SIMD time. This includes everything from simple integer operations to control flow operations like conditional branches (if/else) and jumps, and in certain cases read-only memory operations from a dedicated scalar L1 cache. Overall the scalar unit can execute one instruction per cycle, which means it can complete 4 instructions over the period of time it takes for one wavefront to be completed on a SIMD.
Conceptually this blurs a bit more of the remaining line between a scalar GPU and a vector GPU, but by having both types of units it means that each unit type can work on the operations best suited for it. Besides avoiding feeding SIMDs non-vectorized datasets, this will also improve the latency for control flow operations, where Cayman had a rather nasty 44 cycle latency.








83 Comments
View All Comments
EJ257 - Saturday, June 18, 2011 - link
I can't believe it's been 6 years since the X360 and PS3 release. It seems like this latest generation of consoles stuck around a lot longer than previous versions did. Any speculations on what kind of hardware MS and Sony will throw into the next gen?DanNeely - Sunday, June 19, 2011 - link
They have. The big console makers, at the gave devs requests, were trying to make the current generation last a decade to allow more time to recover the work expended figuring out how to best program them. The motion capture cameras were supposed to be the thing that kept the platforms from getting too stale. I suspect however, that by planning to launch its new console early Nintendo may have blown those plans out of the water.jabber - Sunday, June 19, 2011 - link
I'm pretty sure the hardware specs for both the next Xbox and Playstation have been set in stone already.I'm still betting on a 2013 release too.
So right now GPU wise I reckon we're looking at GPUs currently sitting in the $100 range for both boxes. By 2013, the cost of these chips (suitably modified) will be down to $15 -$10 a box.
I wouldnt have thought anything higher than a 5770 or 450 would be suitable/required.
Targon - Monday, June 20, 2011 - link
It all depends on what you expect. Things feel a bit stagnant on the PC game front because consoles are not evolving, and too many companies want almost exactly the same experience on the PC version as what you have on the console.Stargrazer - Saturday, June 18, 2011 - link
Something doesn't feel right here. In itself, SIMD is about *Data* Level Parallelism, not Thread Level Parallelism. Sure, you could use SIMD units as part of some larger scheme that exploits TLP, but that's not what *SIMD* is about.
Loki726 - Saturday, June 18, 2011 - link
If you use a strict definition of a SIMD programming model, then yes, you are probably right: SIMD is a single sequence of operations executed over multiple data elements.However, over time SIMD has been used to refer to both the aforementioned programming model and the hardware used to implement it. The hardware typically consists of a single control unit that broadcasts instructions to multiple functional units. When people say "a SIMD", they typically mean that hardware implementation rather than the computing model.
If that wasn't confusing enough, in the 1980s GPUs started using that SIMD hardware to execute multiple threads as long as the threads were all executing the same instruction at the same time.
So the statement about using "a SIMD" to exploit TLP is accurate, if you take "a SIMD" to mean a processor pipeline with a single control unit that broadcasts to multiple functional units, and have some scheme for scheduling threads onto functional units.
RedemptionAD - Saturday, June 18, 2011 - link
It seems like a good thing potentially. I hope that their good intentions are followed with good execution, at least better than Fermi.Targon - Sunday, June 19, 2011 - link
It should be interesting going forward. Now that AMD is finally into the 32nm process node, standalone GPUs also stand to gain quite a bit. As long as graphics don't become an afterthought to GPGPU, AMD should be in good shape. Radeon 7970(if that is the next generation GPU) may really be a game changer.Navier - Saturday, June 18, 2011 - link
Will the GCN architecture be able to be virtualized? Can a VMWare/XEN/KVM/HyperV hypervisor create vGPUs accessible by VMs in much the same way as vCPUs are today? With GPUs being integrated within the CPU package it would be a waste of resources if it could not be virtualized.This will become a critical feature for enterprise computing beyond HPC applications. One example would be gaming in a cloud computing environment, where a company provides a service that runs a game on their compute and graphics hardware for a game and streams the output to your mobile device for you to enjoy.
hechacker1 - Saturday, June 18, 2011 - link
Yeah I'm also curious about this. Perhaps with the IOMMU and other CPU like features that the GPU now has, it would be much easier to timeshare the GPU.