AMD Radeon HD 7970 Review: 28nm And Graphics Core Next, Together As One
by Ryan Smith on December 22, 2011 12:00 AM EST- Posted in
- GPUs
- AMD
- Radeon
- ATI
- Radeon HD 7000
A Quick Refresher, Cont
Having established what’s bad about VLIW as a compute architecture, let’s discuss what makes a good compute architecture. The most fundamental aspect of compute is that developers want stable and predictable performance, something that VLIW didn’t lend itself to because it was dependency limited. Architectures that can’t work around dependencies will see their performance vary due to those dependencies. Consequently, if you want an architecture with stable performance that’s going to be good for compute workloads then you want an architecture that isn’t impacted by dependencies.
Ultimately dependencies and ILP go hand-in-hand. If you can extract ILP from a workload, then your architecture is by definition bursty. An architecture that can’t extract ILP may not be able to achieve the same level of peak performance, but it will not burst and hence it will be more consistent. This is the guiding principle behind NVIDIA’s Fermi architecture; GF100/GF110 have no ability to extract ILP, and developers love it for that reason.
So with those design goals in mind, let’s talk GCN.
VLIW is a traditional and well proven design for parallel processing. But it is not the only traditional and well proven design for parallel processing. For GCN AMD will be replacing VLIW with what’s fundamentally a Single Instruction Multiple Data (SIMD) vector architecture (note: technically VLIW is a subset of SIMD, but for the purposes of this refresher we’re considering them to be different).
A Single GCN SIMD
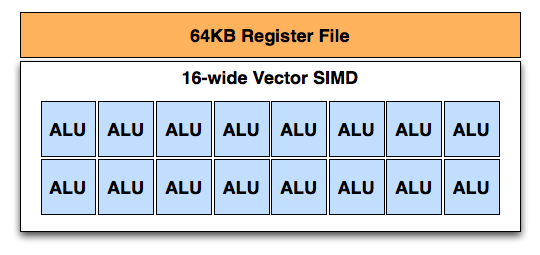
At the most fundamental level AMD is still using simple ALUs, just like Cayman before it. In GCN these ALUs are organized into a single SIMD unit, the smallest unit of work for GCN. A SIMD is composed of 16 of these ALUs, along with a 64KB register file for the SIMDs to keep data in.
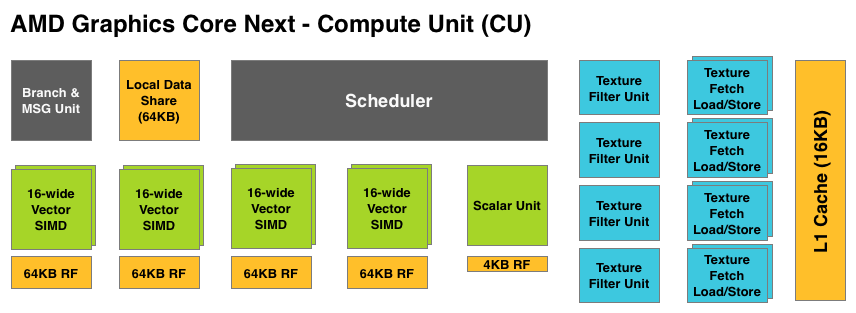
Above the individual SIMD we have a Compute Unit, the smallest fully independent functional unit. A CU is composed of 4 SIMD units, a hardware scheduler, a branch unit, L1 cache, a local date share, 4 texture units (each with 4 texture fetch load/store units), and a special scalar unit. The scalar unit is responsible for all of the arithmetic operations the simple ALUs can’t do or won’t do efficiently, such as conditional statements (if/then) and transcendental operations.
Because the smallest unit of work is the SIMD and a CU has 4 SIMDs, a CU works on 4 different wavefronts at once. As wavefronts are still 64 operations wide, each cycle a SIMD will complete ¼ of the operations on their respective wavefront, and after 4 cycles the current instruction for the active wavefront is completed.
Cayman by comparison would attempt to execute multiple instructions from the same wavefront in parallel, rather than executing a single instruction from multiple wavefronts. This is where Cayman got bursty – if the instructions were in any way dependent, Cayman would have to let some of its ALUs go idle. GCN on the other hand does not face this issue, because each SIMD handles single instructions from different wavefronts they are in no way attempting to take advantage of ILP, and their performance will be very consistent.
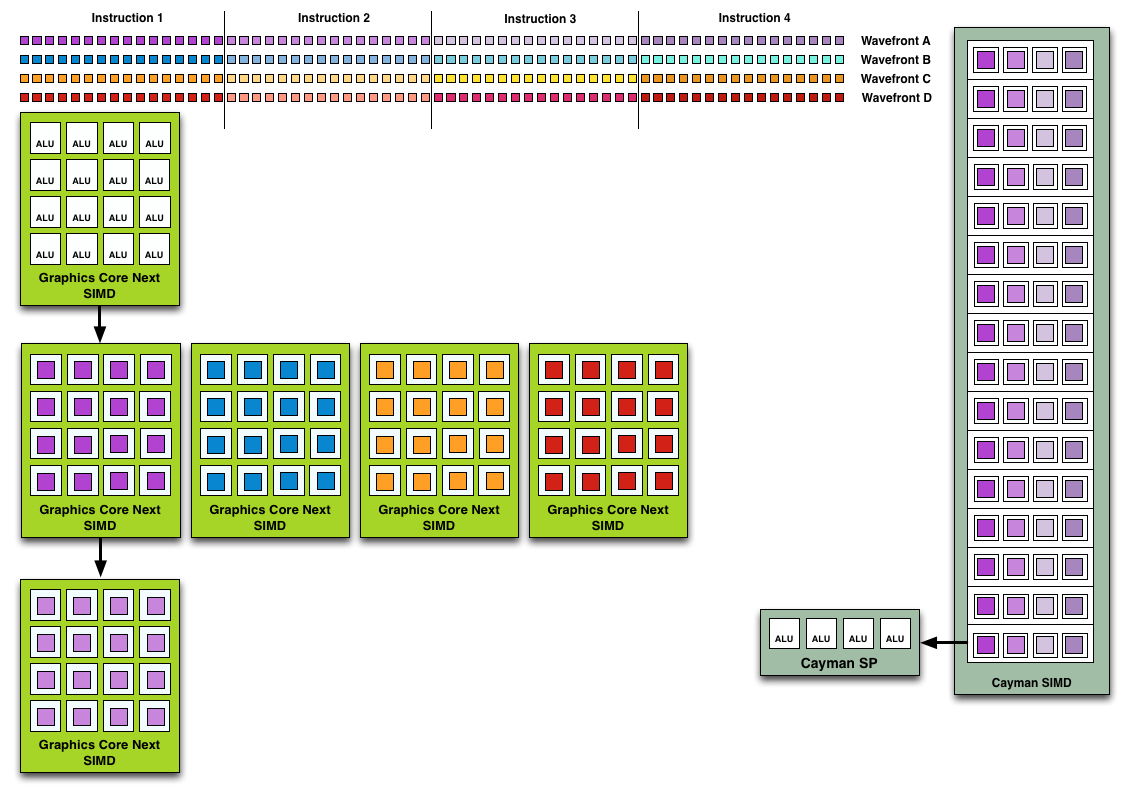
Wavefront Execution Example: SIMD vs. VLIW. Not To Scale - Wavefront Size 16
There are other aspects of GCN that influence its performance – the scalar unit plays a huge part – but in comparison to Cayman, this is the single biggest difference. By not taking advantage of ILP, but instead taking advantage of Thread Level Parallism (TLP) in the form of executing more wavefronts at once, GCN will be able to deliver high compute performance and to do so consistently.
Bringing this all together, to make a complete GPU a number of these GCN CUs will be combined with the rest of the parts we’re accustomed to seeing on a GPU. A frontend is responsible for feeding the GPU, as it contains both the command processors (ACEs) responsible for feeding the CUs and the geometry engines responsible for geometry setup. Meanwhile coming after the CUs will be the ROPs that handle the actual render operations, the L2 cache, the memory controllers, and the various fixed function controllers such as the display controllers, PCIe bus controllers, Universal Video Decoder, and Video Codec Engine.

At the end of the day if AMD has done their homework GCN should significantly improve compute performance relative to VLIW4 while gaming performance should be just as good. Gaming shader operations will execute across the CUs in a much different manner than they did across VLIW, but they should do so at a similar speed. And for games that use compute shaders, they should directly benefit from the compute improvements. It’s by building out a GPU in this manner that AMD can make an architecture that’s significantly better at compute without sacrificing gaming performance, and this is why the resulting GCN architecture is balanced for both compute and graphics.








292 Comments
View All Comments
Wreckage - Thursday, December 22, 2011 - link
That's kind of disappointing.atticus14 - Thursday, December 22, 2011 - link
oh look its that guy that was banned from the forums for being an overboard nvidia zealot.medi01 - Tuesday, January 3, 2012 - link
Maybe he meant "somebody @ anandtech is again pissing on AMDs cookies"?I mean "oh, it's fastest and coolest single GPU card on the market, it is slightly more expensive than competitor's, but it kinda sucks since AMD didn't go "significantly cheaper than nVidia" route" is hard to call unbiased, eh?
Kind of disappointing conclusion, indeed.
ddarko - Thursday, December 22, 2011 - link
To each their own but I think this is undeniable impressive:"Even with the same number of ROPs and a similar theoretical performance limit (29.6 vs 28.16), 7970 is pushing 51% more pixels than 6970 is" and
"it’s clear that AMD’s tessellation efficiency improvements are quite real, and that with Tahiti AMD can deliver much better tessellation performance than Cayman even at virtually the same theoretical triangle throughput rate."
Samus - Thursday, December 22, 2011 - link
I prefer nVidia products, mostly because the games I play (EA/DICE Battlefield-series) are heavily sponsered by nVidia, giving them a developement-edge.That out of the way, nVidia has had their problems just like this card is going to experience. Remember when Fermi came out, it was a performance joke, not because it was slow, but because it used a ridiculous amount of power to do the same thing as an ATI card while costing substantially more.
Fermi wasn't successful until second-generation products were released, most obviously the GTX460 and GT430, reasonably priced cards with quality drivers and low power consumption. But it took over a year for nVidia to release those, and it will take over a year for ATI to make this architecture shine.
kyuu - Thursday, December 22, 2011 - link
Wat? The only thing there might be an issue with is drivers. As far as power consumption goes, this should be better than Cayman.CeriseCogburn - Sunday, March 11, 2012 - link
He's saying the 28mn node will have further power improvements. Take it as an amd compliment - rather you should have.StriderTR - Thursday, December 22, 2011 - link
EA/Dice are just as heavily sponsored by AMD, more in fact. Not sure where your getting your information, but its .. well ... wrong. Nvidia bought the rights to advertize the game with their hardware, AMD is heavily sponsoring BF3 and related material. Example, The Controller.Also, the GTX 580 and HD 6970 perform within a few FPS of each other on BF3. I run dual 6970's, by buddy runs dual 580's, we are almost always within 2 FPS of one and other at any given time.
AMD will have the new architecture "shining" in far under a year. They have been focused on it for a long time already.
Simple bottom line, both Nvidia and AMD make world class cards these days. No matter your preference, you have cards to choose from that will rock any games on the planet for a long time to come.
deaner - Thursday, December 22, 2011 - link
Umm, yea no. Not so much with nvidia and EA/DICE Batttlefield series giving nvidia a development edge. (if it does, the results are yet to be seen)Facts are facts, the 5 series to our current review today, the 7970, do and again continue to edge the Nvidia lines. The AMD Catalyst performance of particular note, BF3, has been far superior.
RussianSensation - Thursday, December 22, 2011 - link
."..most obviously the GTX460 and GT430, reasonably priced cards with quality drivers and low power consumption. But it took over a year for nVidia to release those"GTX470/480 launched March 26, 2010
GTX460 launched July 12, 2010
GT430 launched October 11, 2010
Also, Fermi's performance at launch was not a joke. GTX470 delivered performance between HD5850 and HD5870, priced in the middle. Looking now, GTX480 ~ HD6970. So again, both of those cards did relatively well at the time. Once you consider overclocking of the 470/480, they did extremely well, both easily surprassing the 5870 in performance in overclocked states.
Sure power consumption was high, but that's the nature of the game for highest-end GPUs.