NVIDIA Tegra X1 Preview & Architecture Analysis
by Joshua Ho & Ryan Smith on January 5, 2015 1:00 AM EST- Posted in
- SoCs
- Arm
- Project Denver
- Mobile
- 20nm
- GPUs
- Tablets
- NVIDIA
- Cortex A57
- Tegra X1
Automotive: DRIVE CX and DRIVE PX
While NVIDIA has been a GPU company throughout the entire history of the company, they will be the first to tell you that they know they can’t remain strictly a GPU company forever, and that they must diversify themselves if they are to survive over the long run. The result of this need has been a focus by NVIDIA over the last half-decade or so on offering a wider range of hardware and even software. Tegra SoCs in turn have been a big part of that plan so far, but NVIDIA of recent years has become increasingly discontent as a pure hardware provider, leading to the company branching out in unusual ways and not just focusing on selling hardware, but selling buyers on whole solutions or experiences. GRID, Gameworks, and NVIDIA’s Visual Computing Appliances have all be part of this branching out process.
Meanwhile with unabashed car enthusiast Jen-Hsun Huang at the helm of NVIDIA, it’s slightly less than coincidental that the company has also been branching out in to automotive technology as well. Though still an early field for NVIDIA, the company’s Tegra sales for automotive purposes have otherwise been a bright spot in the larger struggles Tegra has faced. And now amidst the backdrop of CES 2015 the company is taking their next step into automotive technology by expanding beyond just selling Tegras to automobile manufacturers, and into selling manufacturers complete automotive solutions. To this end, NVIDIA is announcing two new automotive platforms, NVIDIA DRIVE CX and DRIVE PX.
DRIVE CX is NVIDIA’s in-car computing platform, which is designed to power in-car entertainment, navigation, and instrument clusters. While it may seem a bit odd to use a mobile SoC for such an application, Tesla Motors has shown that this is more than viable.
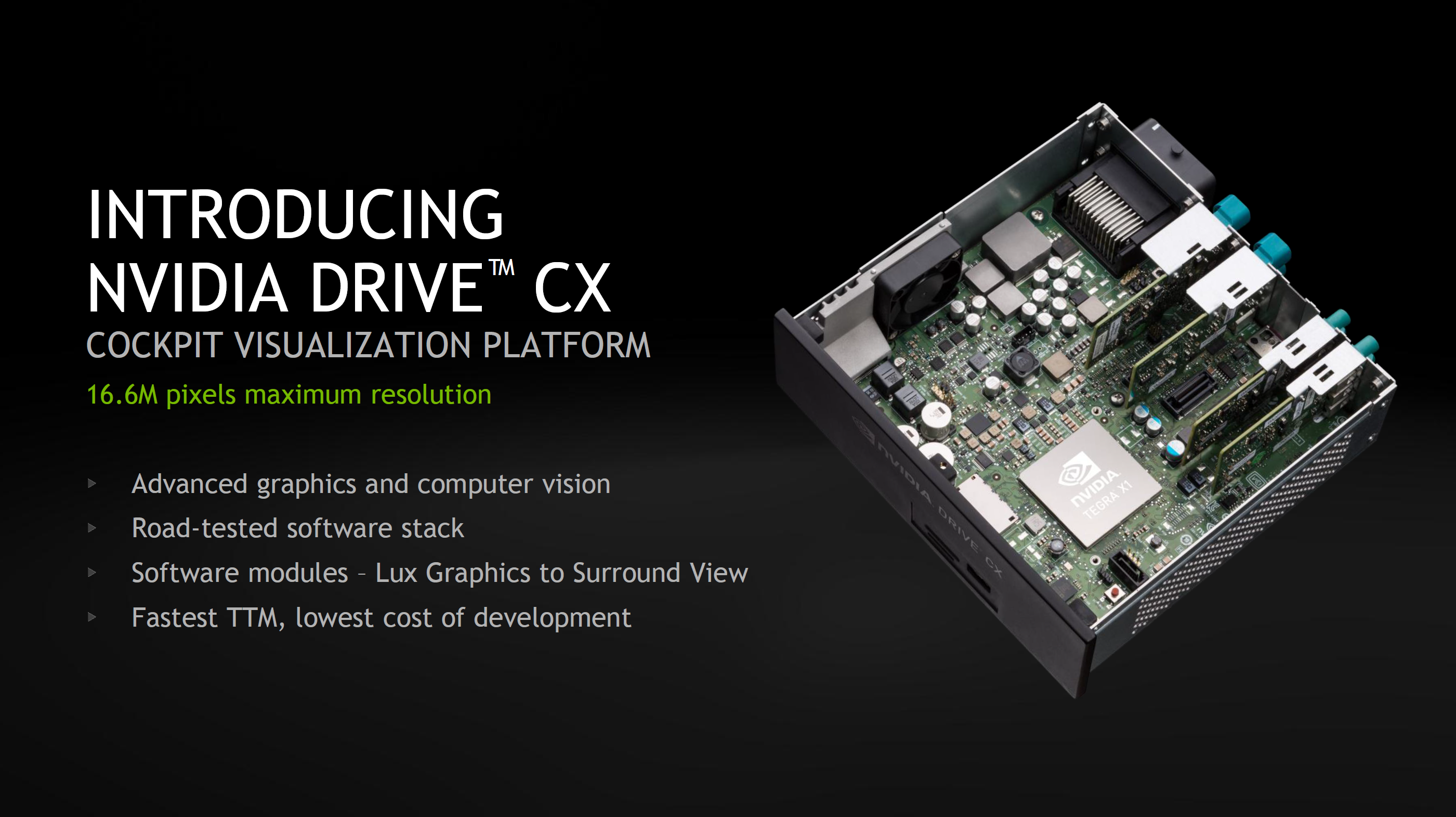
With NVIDIA’s DRIVE CX, automotive OEMs have a Tegra X1 in a board that provides support for Bluetooth, modems, audio systems, cameras, and other interfaces needed to integrate such an SoC into a car. This makes it possible to drive up to 16.6MP of display resolution, which would be around two 4K displays or eight 1080p displays. However, each DRIVE CX module can only drive three displays. In press photos, it appears that this platform also has a fan which is likely necessary to enable Tegra X1 to run continuously at maximum performance without throttling.
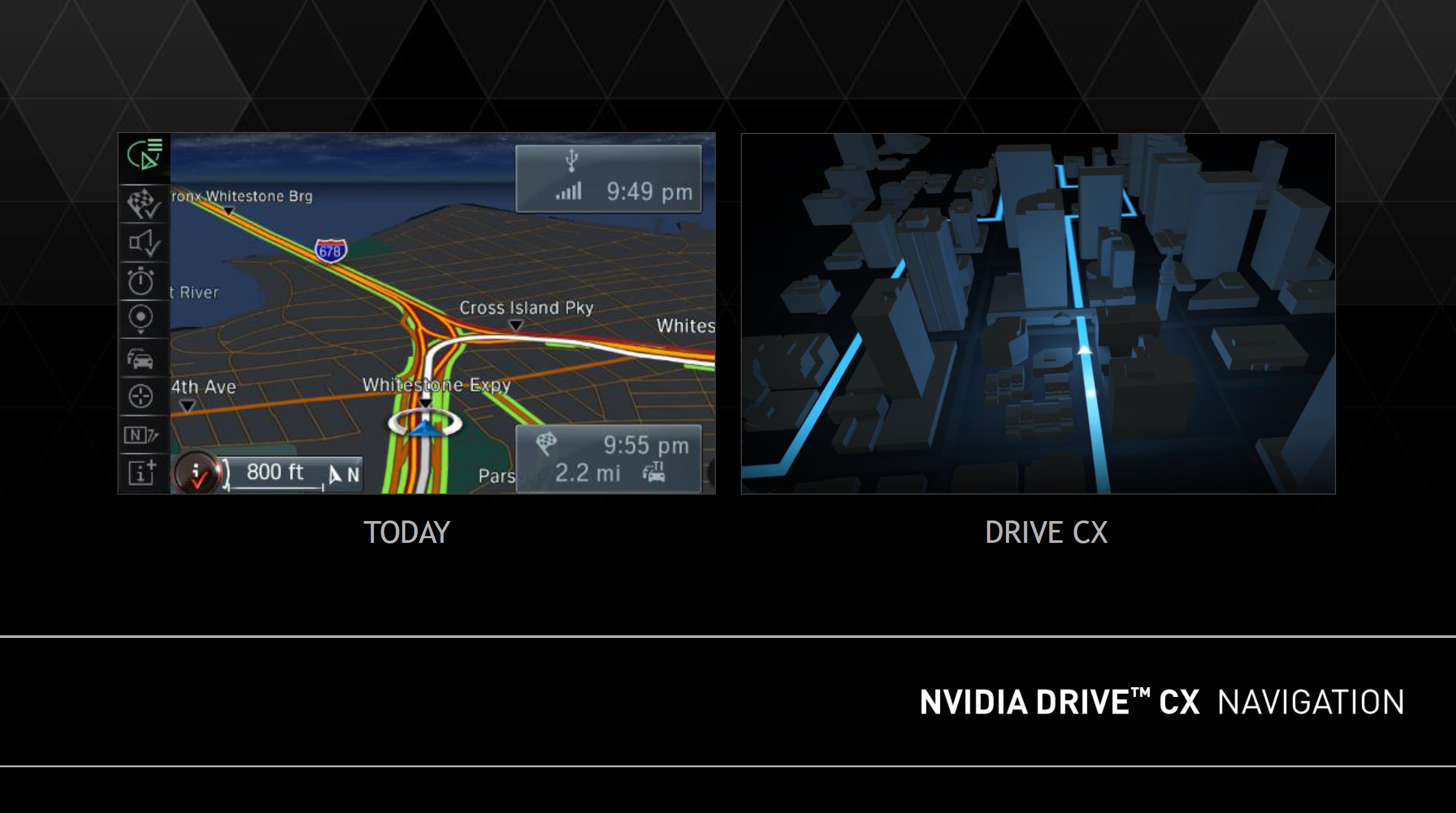
NVIDIA showed off some examples of where DRIVE CX would improve over existing car computing systems in the form of advanced 3D rendering for navigation to better convey information, and 3D instrument clusters which are said to better match cars with premium design. Although the latter is a bit gimmicky, it does seem like DRIVE CX has a strong selling point in the form of providing an in-car computing platform with a large amount of compute while driving down the time and cost spent developing such a platform.
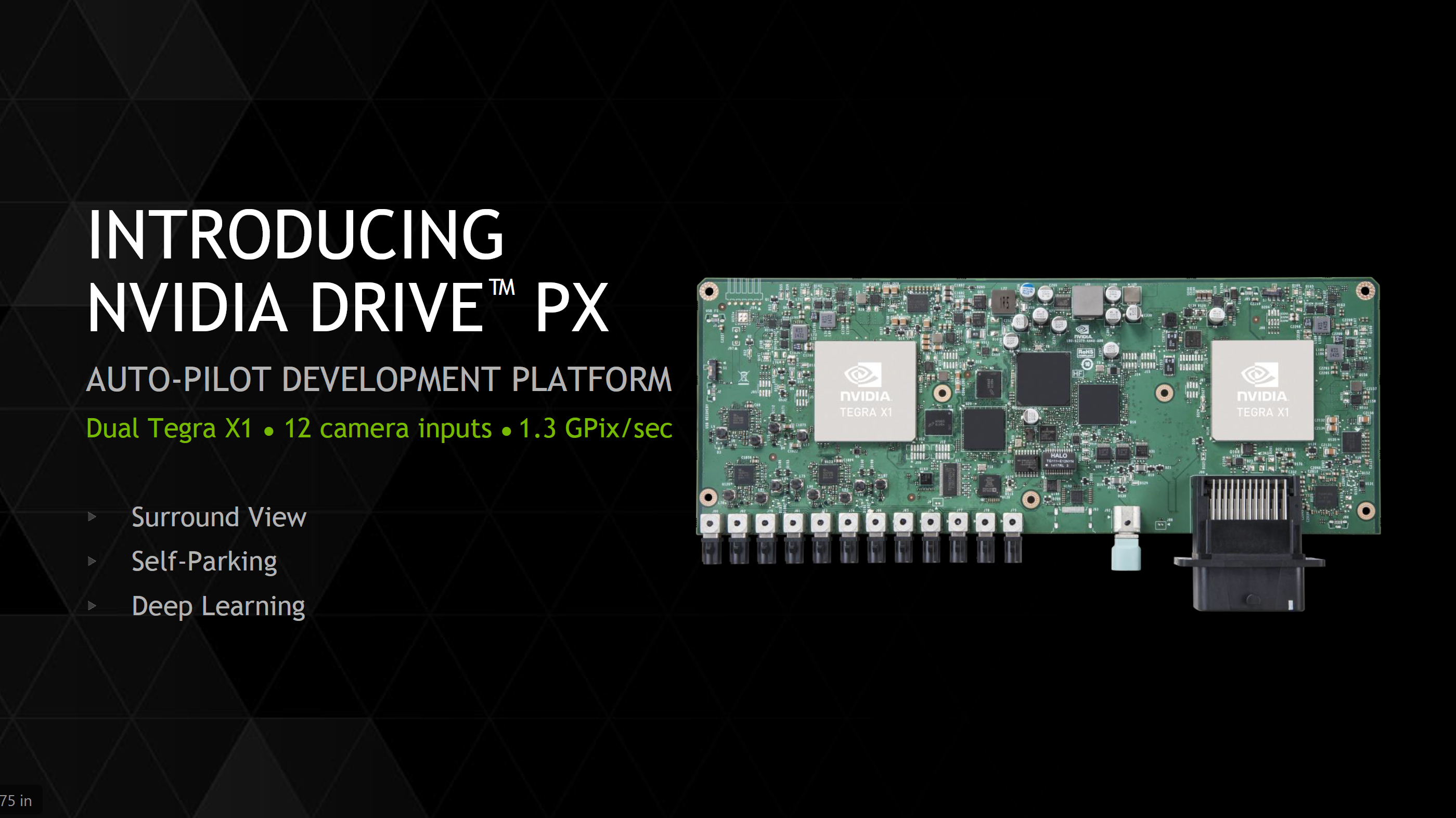
While DRIVE CX seems to be a logical application of a mobile SoC, DRIVE PX puts mobile SoCs in car autopilot applications. To do this, the DRIVE PX platform uses two Tegra X1 SoCs to support up to twelve cameras with aggregate bandwidth of 1300 megapixels per second. This means that it’s possible to have all twelve cameras capturing 1080p video at around 60 FPS or 720p video at 120 FPS. NVIDIA has also made most of the software stack needed for autopilot applications already, so there would be comparatively much less time and cost needed to implement features such as surround vision, auto-valet parking, and advanced driver assistance.
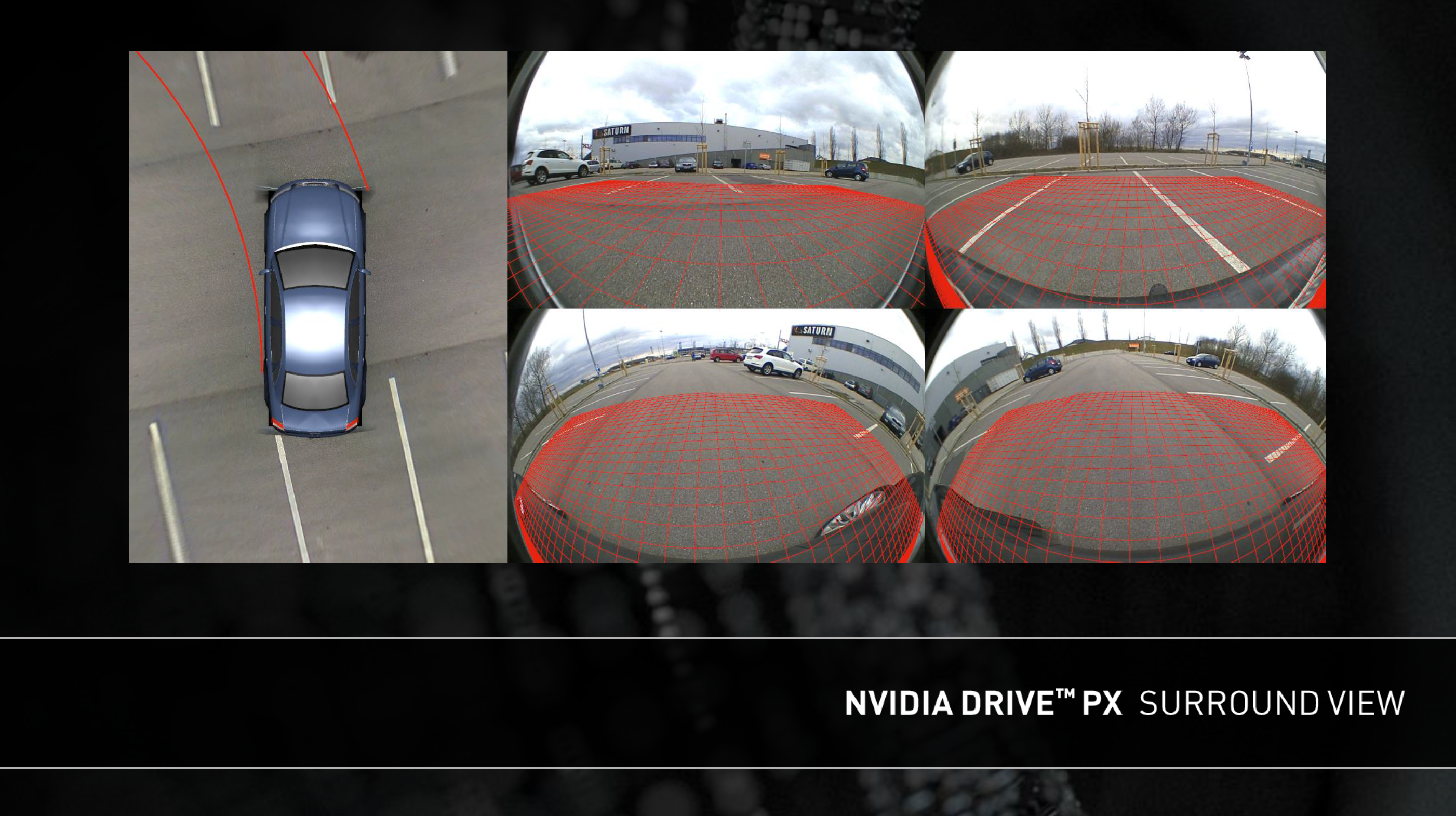
In the case of surround vision, DRIVE PX is said to deliver a better experience by improving stitching of video to reduce visual artifacts and compensate for varying lighting conditions.
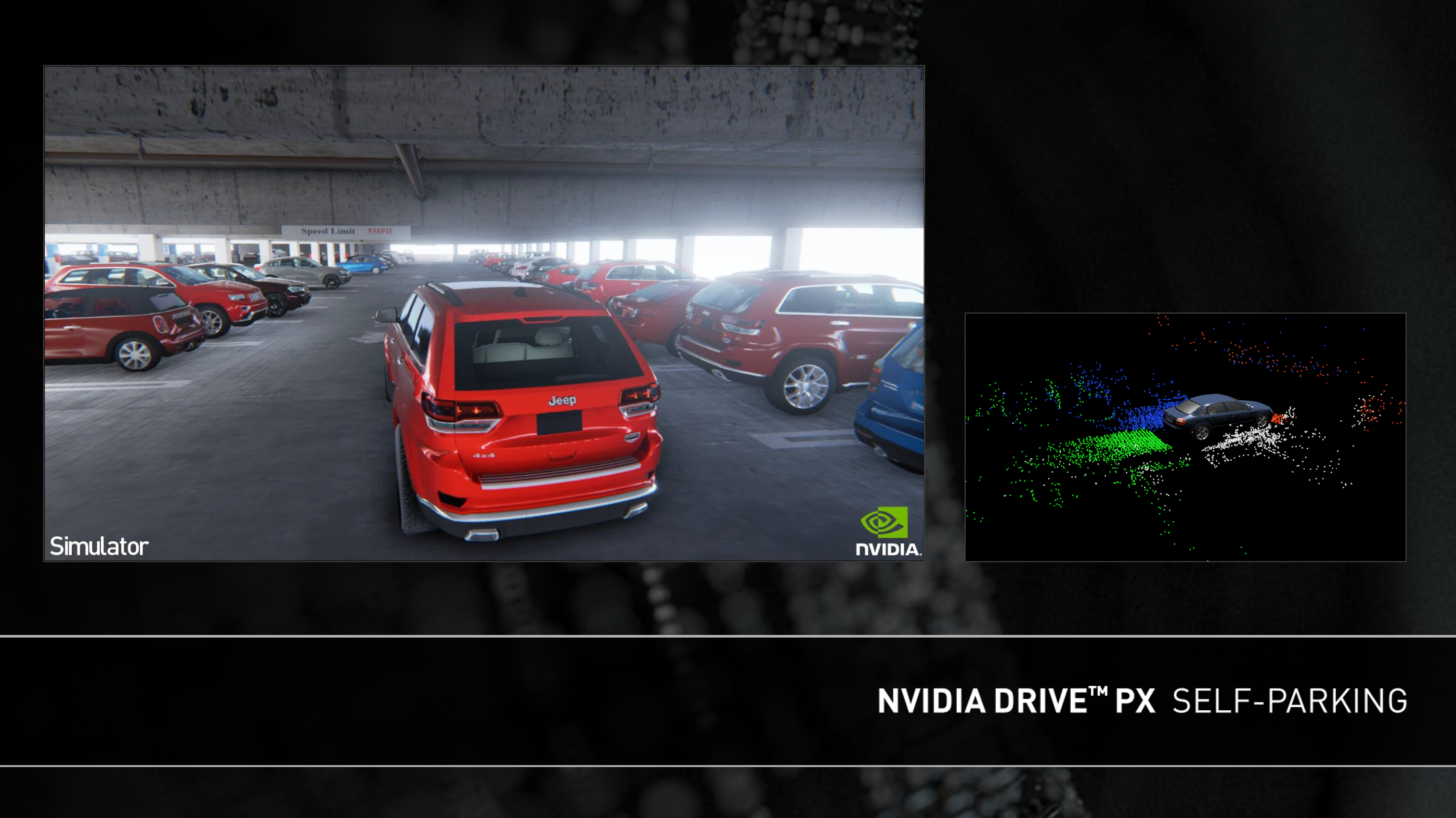
The valet parking feature seems to build upon this surround vision system, as it uses cameras to build a 3D representation of the parking lot along with feature detection to drive through a garage looking for a valid parking spot (no handicap logo, parking lines present, etc) and then autonomously parks the car once a valid spot is found.
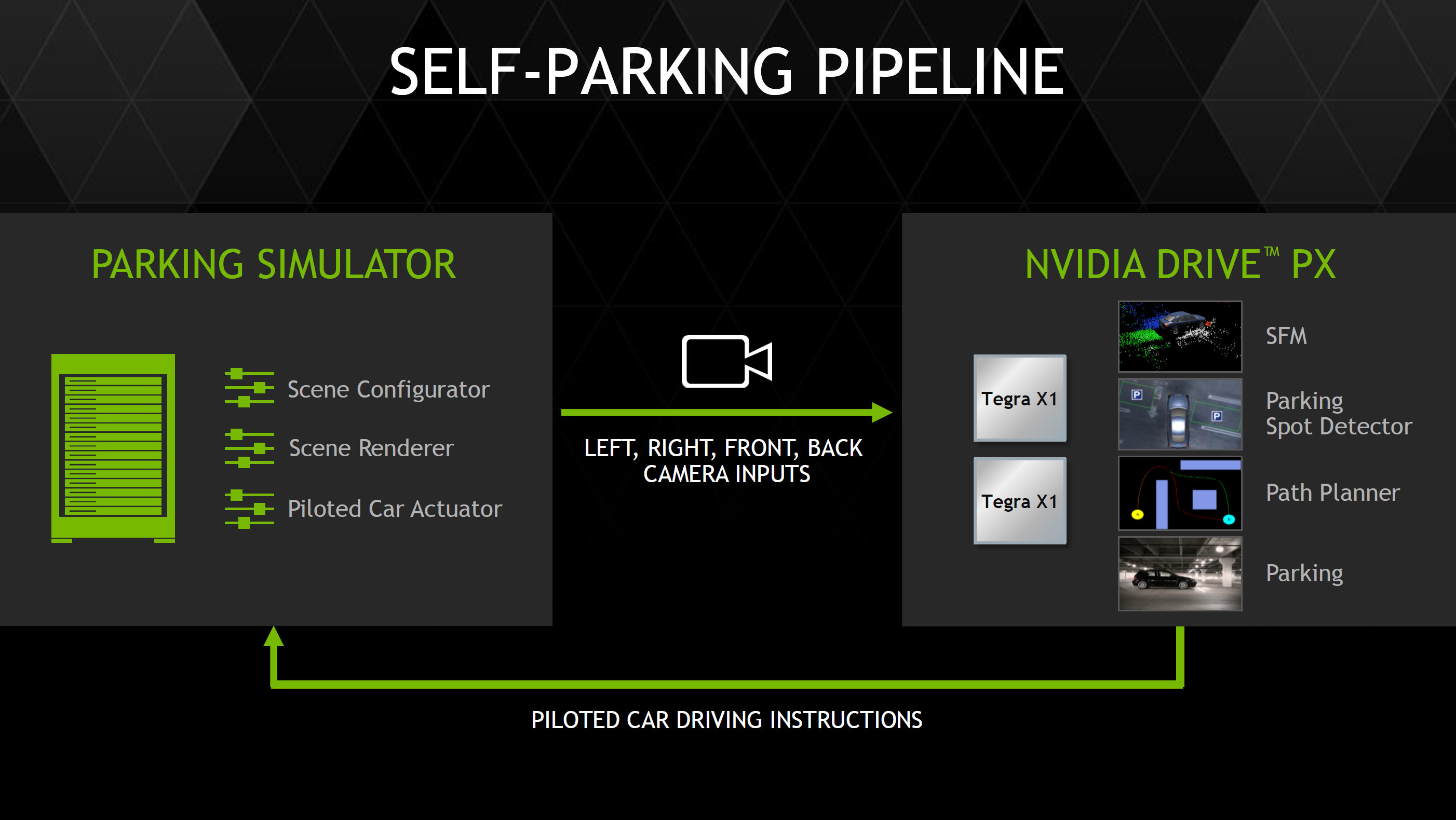
NVIDIA has also developed an auto-valet simulator system with five GTX 980 GPUs to make it possible for OEMs to rapidly develop self-parking algorithms.
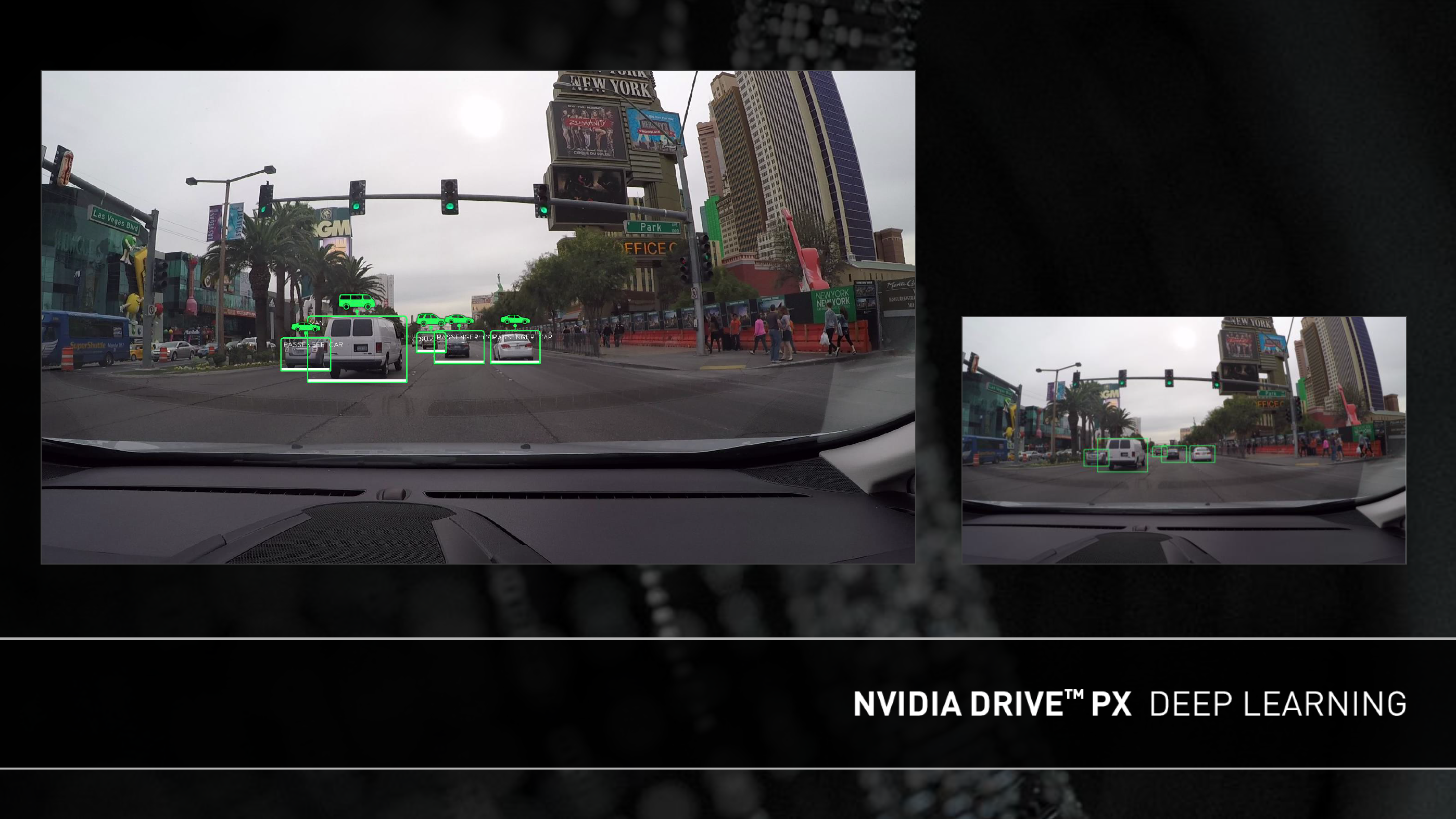
The final feature of DRIVE PX, advanced driver assistance, is possibly the most computationally intensive out of all three of the previously discussed features. In order to deliver a truly useful driver assistance system, NVIDIA has leveraged neural network technologies which allow for object recognition with extremely high accuracy.
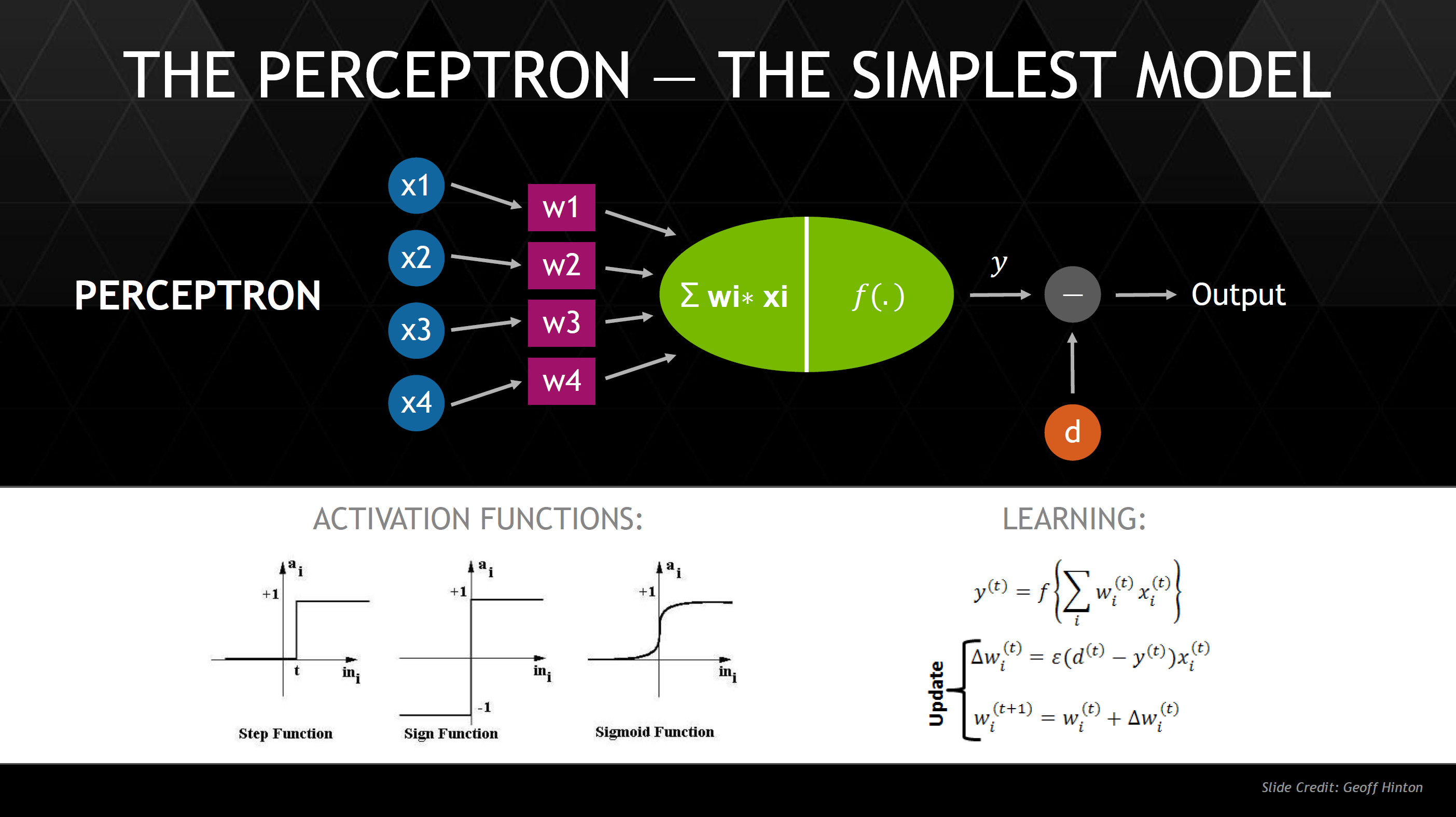
While we won’t dive into deep detail on how such neural networks work, in essence a neural network is composed of perceptrons, which are analogous to neurons. These perceptrons receive various inputs, then given certain stimulus levels for each input the perceptron returns a Boolean (true or false). By combining perceptrons to form a network, it becomes possible to teach a neural network to recognize objects in a useful manner. It’s also important to note that such neural networks are easily parallelized, which means that GPU performance can dramatically improve performance of such neural networks. For example, DRIVE PX would be able to detect if a traffic light is red, whether there is an ambulance with sirens on or off, whether a pedestrian is distracted or aware of traffic, and the content of various road signs. Such neural networks would also be able to detect such objects even if they are occluded by other objects, or if there are differing light conditions or viewpoints.
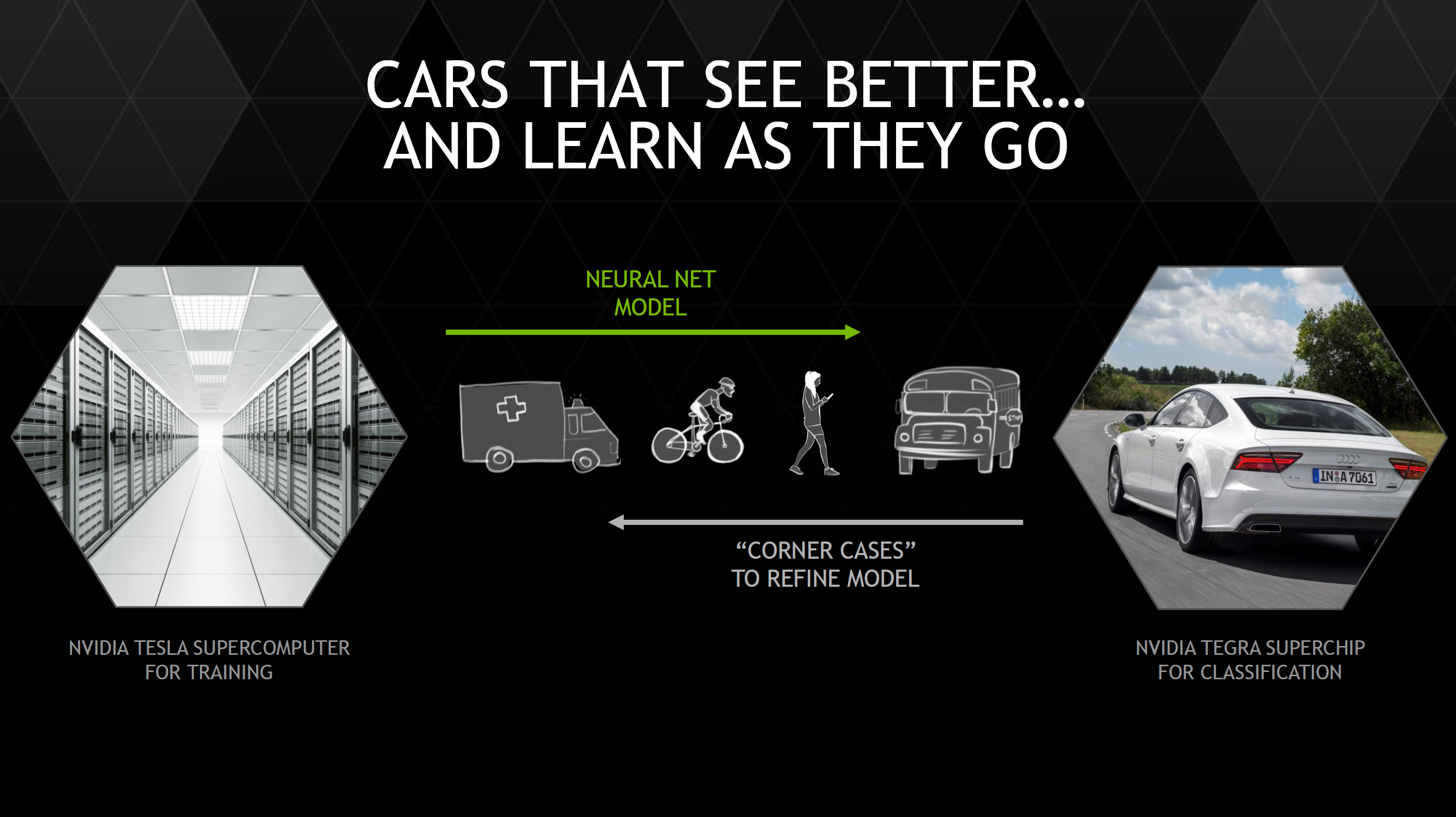
While honing such a system would take millions of test images to reach high accuracy levels, NVIDIA is leveraging Tesla in the cloud for training neural networks that are then loaded into DRIVE PX instead of local training. In addition, failed identifications are logged and uploaded to the cloud in order to further improve the neural network. Both of these updates can be done either over the air or at service time, which should mean that driver assistance will improve with time. It isn’t a far leap to see how such technology could also be leveraged in self-driving cars as well.
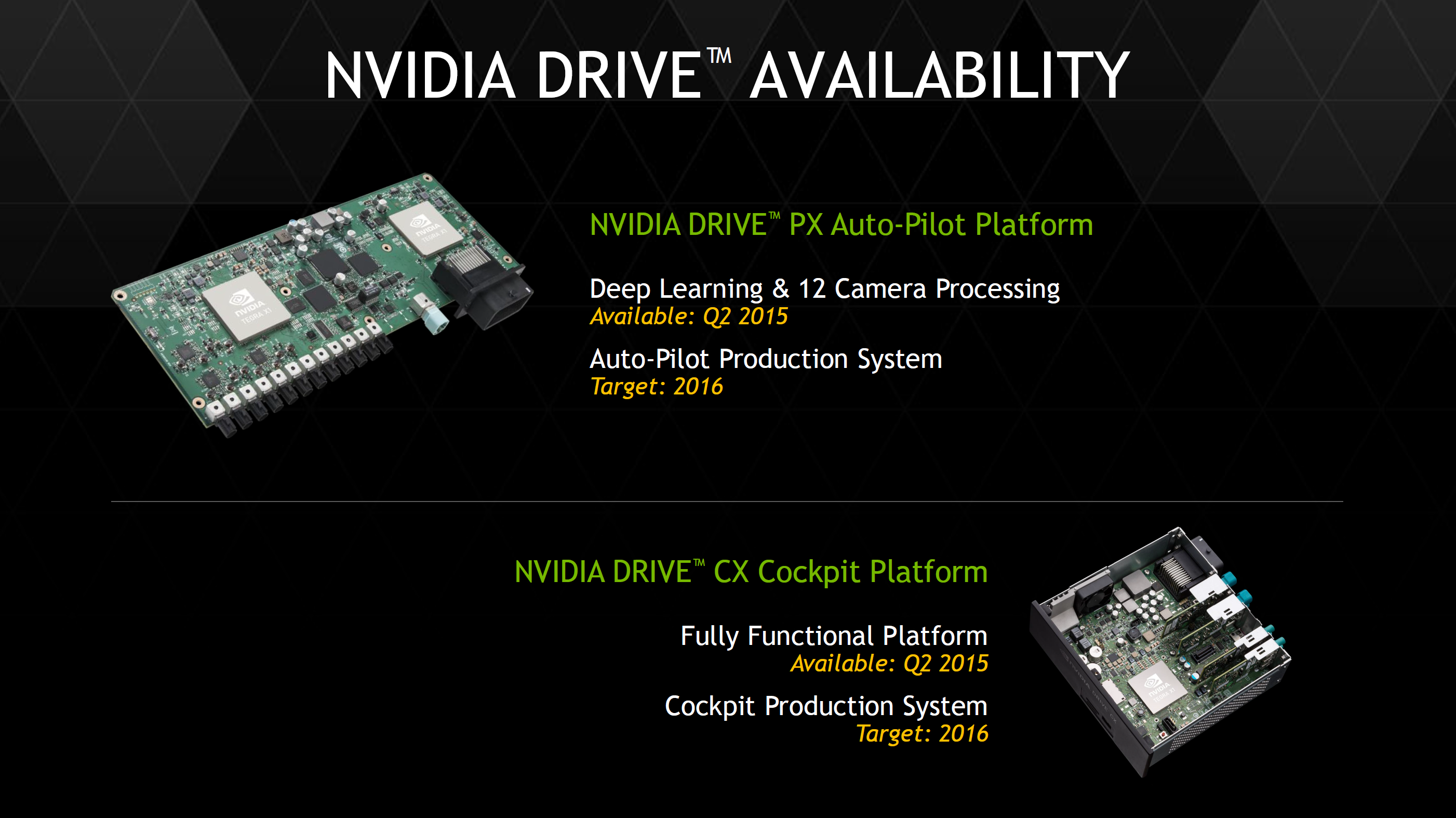
Overall, NVIDIA seems to be planning for the DRIVE platforms to be ready next quarter, and production systems to be ready for 2016. This should mean that it's possible for vehicles launching in 2016 to have some sort of DRIVE system present, although it's possible that it would take until 2017 to see this happen.








194 Comments
View All Comments
SM123456 - Sunday, February 1, 2015 - link
>>He was saying: why NV didn't continue with Denver design? Being so efficient and only 2 cores why don't shift at 20nn easily? Because they can't and that's it. The other things are speculations.<<There is a simple answer to that - Apple has booked all the production slots for 20nm (made by foundry TSMC) to meet demand for the A8. This has pushed back production of the 16nm to late 2015. That is the reason for the delay in Denver, which nVidia originally intended for the Tegra K1 Denver successor, the Pascal chip. That is the reason for the delay in Pascal.
20nm is a risk reducing interim technology which almost everybody is skipping. Apple originally wanted 14/16nm for the A8, only used 20nm because they couldn't wait to release the current iPhone on 14/16nm. nVidia is only producing the Tegra X1 at 20nm because they are worried about the same problem happening at 16nm. With 20nm, they know that Apple will be moving off 20nm with the next iPhone, so there will definitely be spare production capacity.
utferris - Monday, April 13, 2015 - link
I can not agree you any more. They aliens can not be reasonable.GC2:CS - Wednesday, January 7, 2015 - link
2) I could make 4 cluster A7 GPU faster than tegra K1 and I could make a 16 cluster series 7XT GPU that's slower than tegra K1.So tell me how the heck does the number of clusters or "cores" relates to efficiency ???
lucam - Wednesday, January 7, 2015 - link
Since you re so expert about Imagt cluster you can explain why there some model of G6230 - 2 clusters (Allwinner socs) fast as much as an A7 (G6430) - 4 clusters. Maybe because the former has clock frequency higher than latter? But are pretty much the same in term of performance/watt....there we go..SM123456 - Sunday, February 1, 2015 - link
Errr.. same performance and price per watt for Apple on 20nm as nVidia at 28nm? That is damning.SM123456 - Sunday, February 1, 2015 - link
The cores aren't important, the performance is. That is the whole point. The responsiveness depends on single core performance and to a lesser extent two core performance, and on this point Denver beats the crap out of the Apple A8 and A8X. Therefore the fact that Apple added an extra core to the A8 to get A8X is about benchmark bragging rights, and the A8X real world performance (based on single and dual core performance) lags the Tegra K1 Denver even with A8X on 20nm and Denver K1 on 28nm - not good for Apple.lucam - Tuesday, January 6, 2015 - link
The Tegra speculations of chizow are priceless!aenews - Saturday, January 24, 2015 - link
The K1 is four months or so older than the A8X. It crushed every chip very badly for four whole months. If anything, everyone else was/is playing catchup. And not to mention the Snapdragon 810, yet to be released, does not even come close to the K1 despite being a year newer.utferris - Monday, April 13, 2015 - link
> "The K1 is four months or so older than the A8X."How do you come up with that?
A8X was in production way before K1.
It is just you see A8X only on ipad, when NVidia is showing off all around the test board that does not actually in production.
chizow - Monday, January 5, 2015 - link
@Mayuyu; I wouldn't be surprised if this is the final outcome of the Nvidia IP Patent lawsuits and why Apple was excluded from the original litigation. My bet is they (Apple) have already engaged in serious talks with Nvidia and they are both just awaiting a favorable outcome against Samsung/Qualcomm before moving forward.