Western Digital Expands HGST Helium Drive Lineup with 10TB Ultrastar He10
by Ganesh T S on December 2, 2015 3:01 AM EST- Posted in
- Enterprise
- Storage
- HDDs
- Western Digital
- HGST
HGST, a Western Digital subsidiary, has been shipping hard drives sealed with helium for a couple of years now. Their helium drives have so far come in two flavors - the Ultrastar He drives using platters with traditional perpendicular magnetic recording (PMR) technology and the Ultrastar Archive Ha drives using platters with shingled magnetic recording (SMR). There are two main patented innovations behind the helium drives, HelioSeal and 7Stac. The former refers to placement of the platters in a hermetically sealed enclosure filled with helium instead of air. The latter refers to packaging of seven platters in the same 1" high form factor of traditional 3.5" drives.
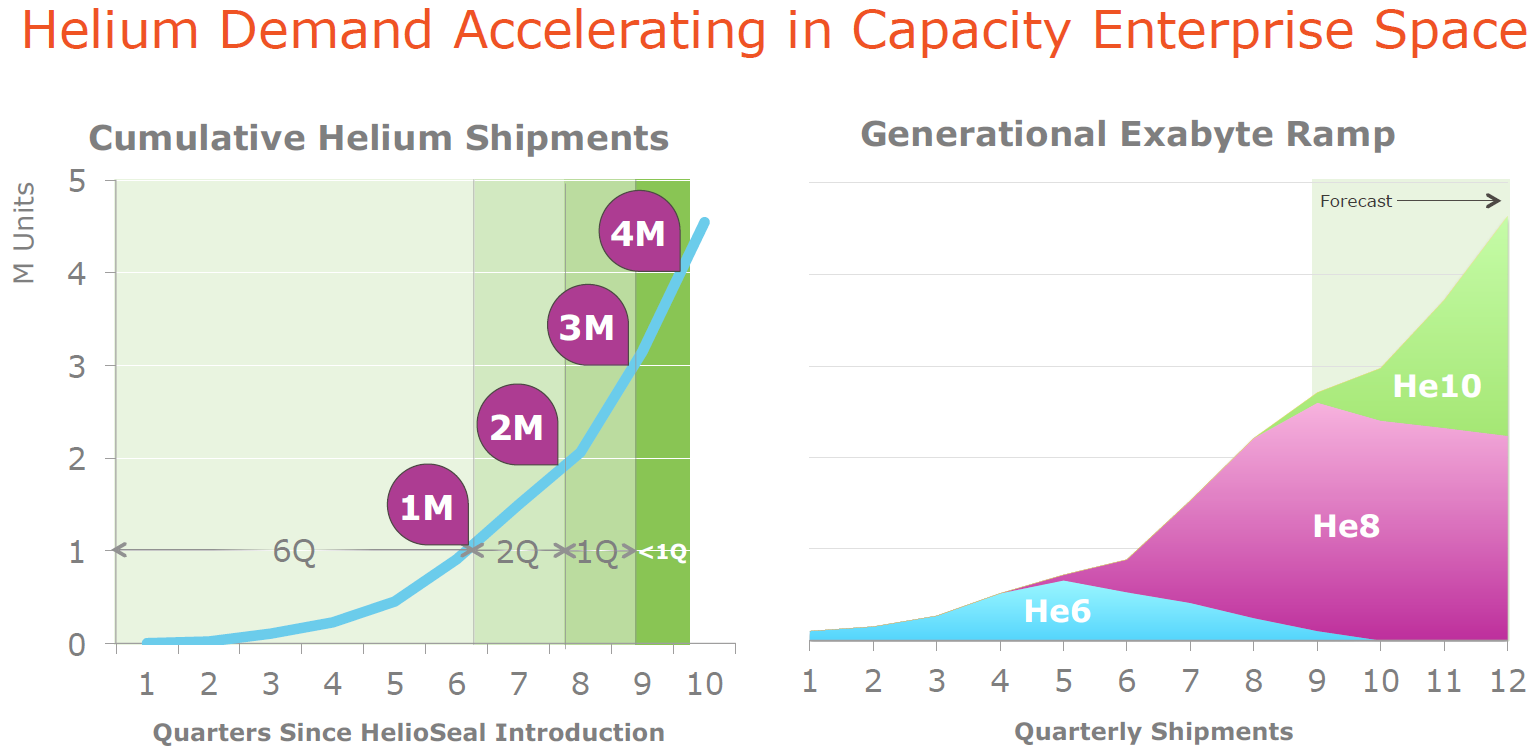
The Ultrastar He6 6TB drive was introduced in November 2013, and this was followed by the He8 8TB drive late last year. In June 2015, the Ultrastar Ha10 SMR drive with HelioSeal technology was introduced. Around the same time, HGST also made it known that more than 1M HelioSeal units had been deployed. 1.33 TB platters have become available in air drives now, and HGST is taking advantage of that in the 10TB Ultrastar He10. The launch of the Ultrastar He10 PMR drive today also brings the news that more than 4M HelioSeal units have been deployed in various datacenters - pointing to the rapid rise in adoption rate of this technology.
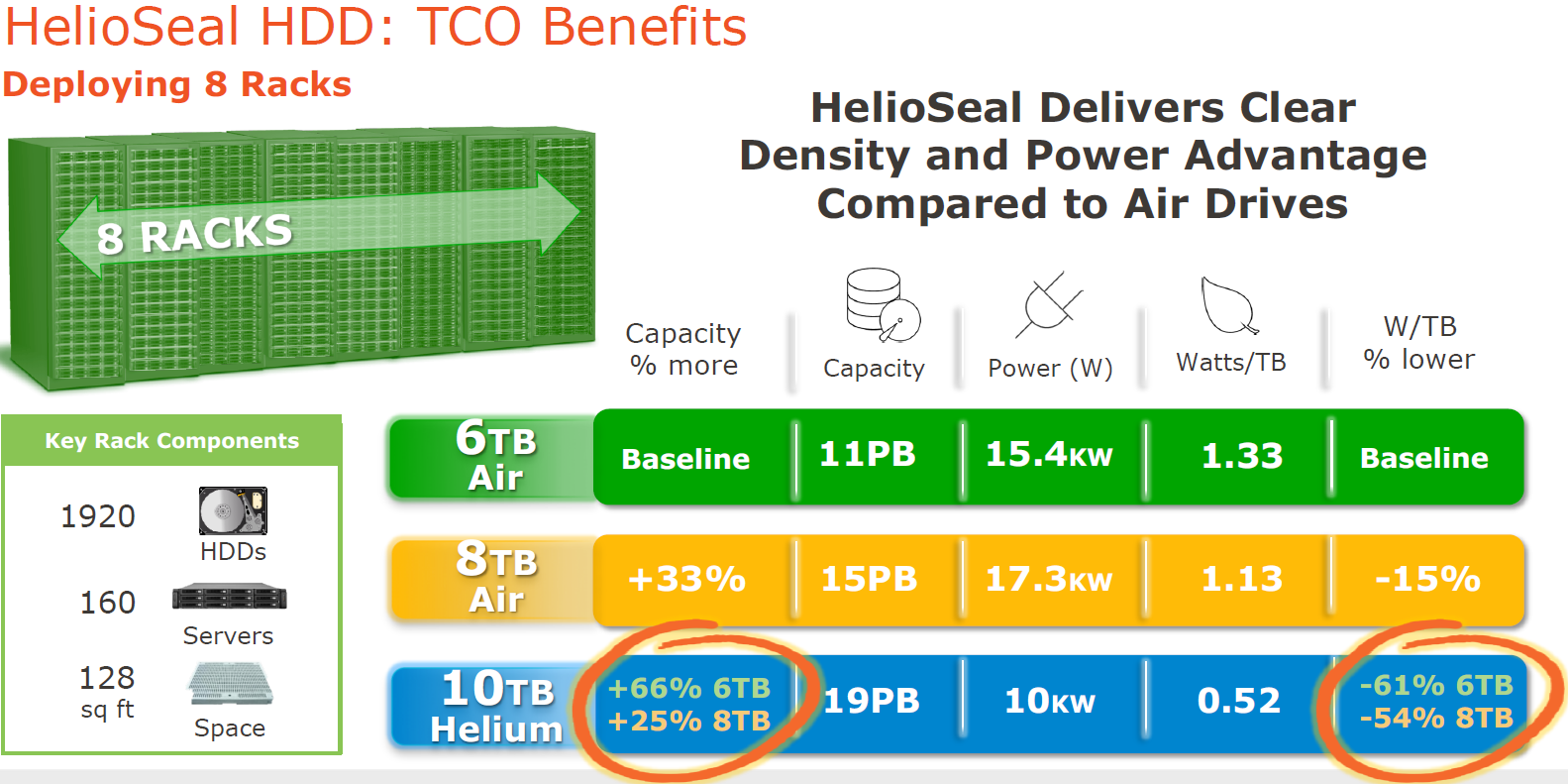
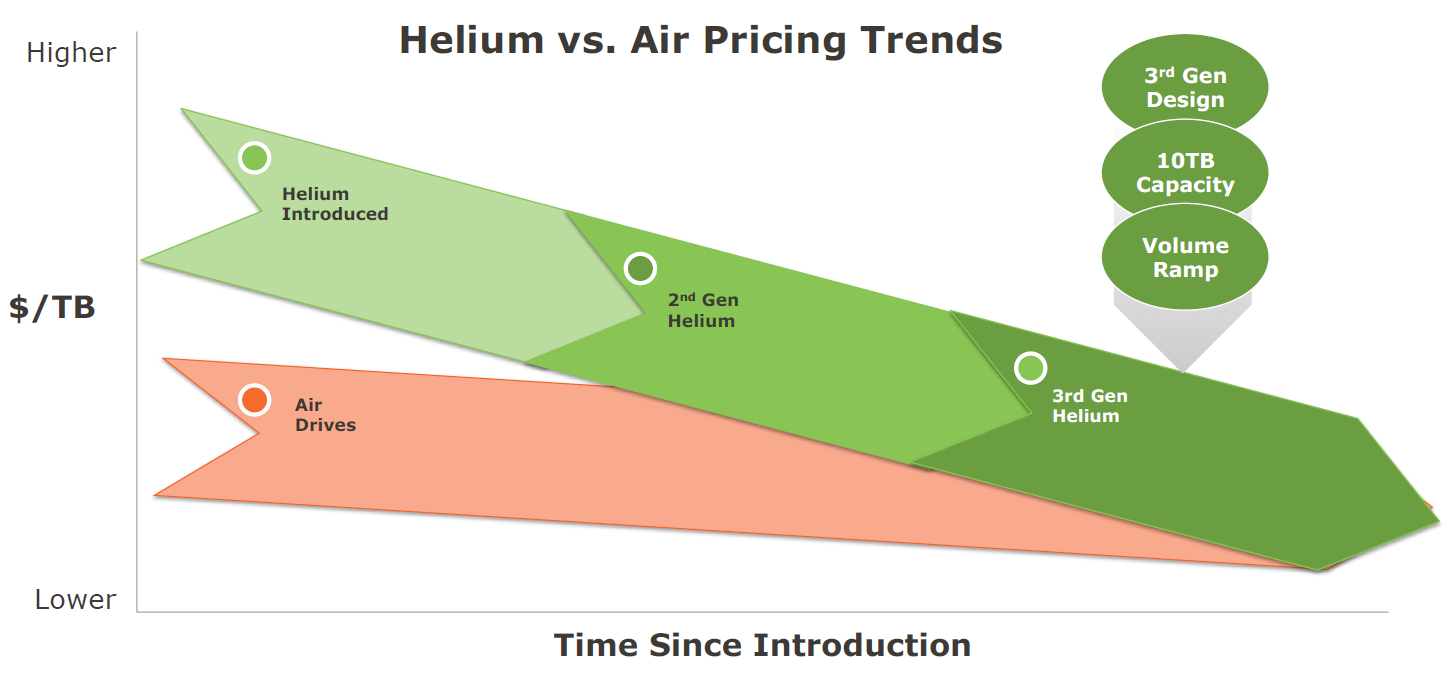
We have already seen in our reviews that the helium drives offer the best performance to power ratio and watts per TB metric amongst all the drives in their capacity class. HGST also claim a 2.5M hour MTBF - much higher than traditional enterprise PMR drives. The initial cost of the helium drives have been substantially higher compared to the standard drives of the same capacity, but the TCO (total cost of ownership) metric is highly in favor of these drives - particularly for datacenter customers who need the drives to be active 24x7. HGST's press briefing included a slide that presented the potential TCO benefits that come about due to the increased capacity per rack, lower consumption per rack and lower power consumption per TB of the new He10 drives.
HGST indicated that the ramp in volume should help the initial cost to approach that of the air drives in the near future. For datacenter customers, that would mean an acceleration in obtaining the TCO benefits.
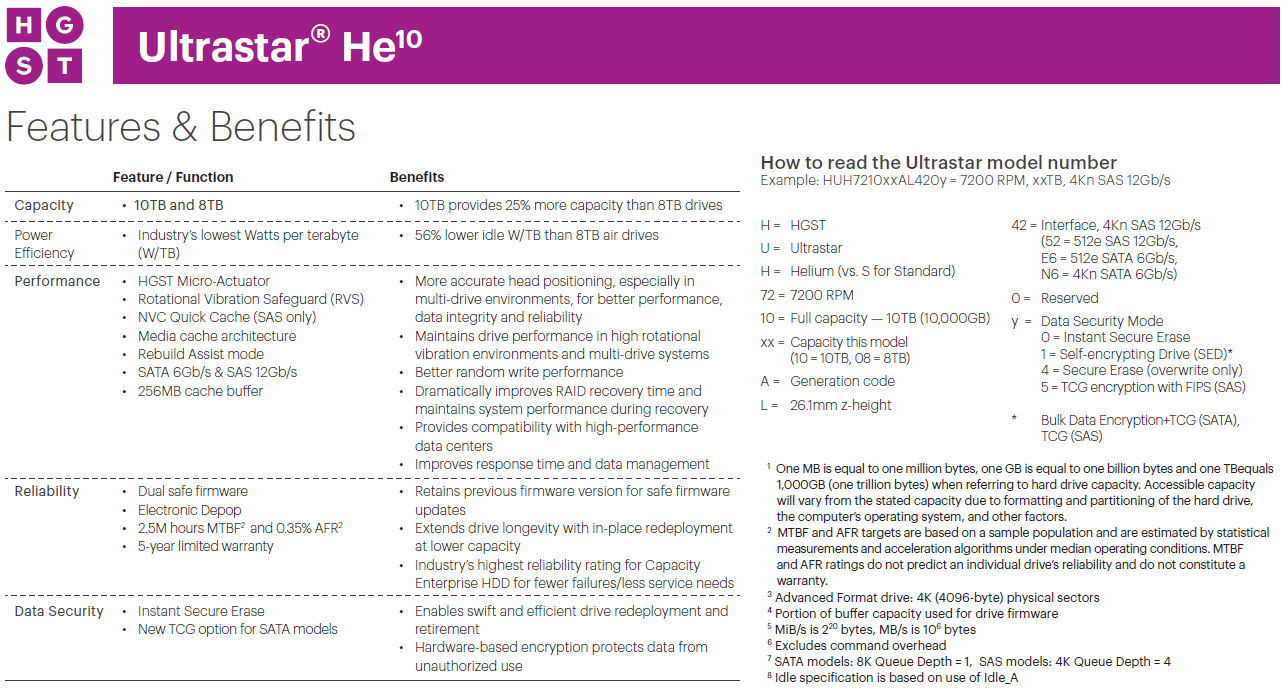
Coming to the core specifications, the Ultrastar He10 will come in both SATA 6Gbps and SAS 12Gbps varieties. The drives have 4KB sectors, though SKUs with 512-byte emulation are also available. Various data security options such as instant secure erase, self-encryption, secure erase and TCG encryption with FIPS are available.
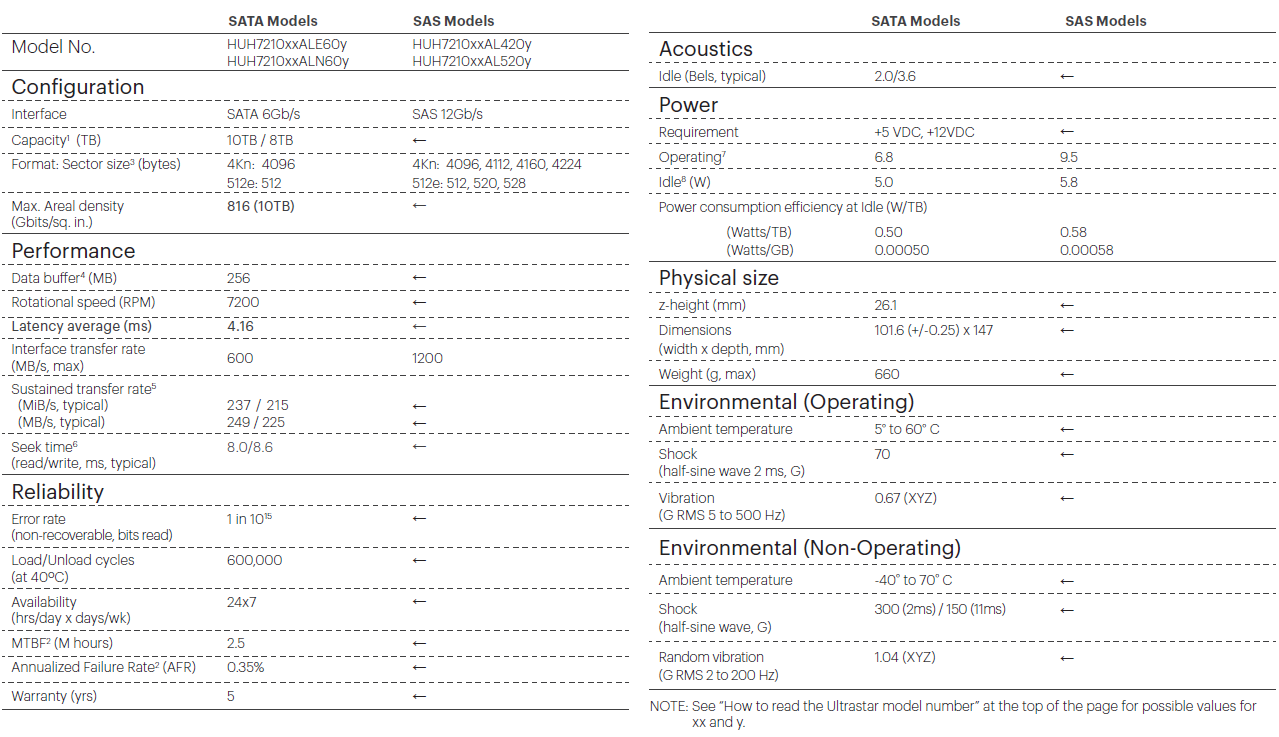
The standard Ultrastar He drive features such as rotational vibration safeguard (for better RV tolerance in multi-drive servers) and the rebuild assist mode (for faster RAID rebuild) are retained. The drives come with a 256MB DRAM buffer.
Hard drives are struggling to reach the 10TB capacity point with traditional PMR technology. While Seagate did announce a few 8TB PMR drives earlier this quarter, it really looks like vendors need to move to some other technology (shingled magnetic recording or heat-assisted magnetic recording (HAMR)) in order to keep the $/TB metric competitive against the upcoming high-capacity SSDs. As of now, helium seems to be the only proven solution causing minimal performance impact and HGST appears to have a strong hold in this particular market segment.








113 Comments
View All Comments
ddriver - Saturday, December 5, 2015 - link
Wow, you found a photo of a hard drive - you are a mastermind of the highest order. Good for you.Now, consider the fact that this actuator from the photo is used to move a total of SIX arms, fused in a single assembly. Now consider that an independently operating head would require only one arm, in the case of a 35% wider platter let's say it will 35% heavier, thus 6 / 1.35 = 4.44 times lighter than the arm assembly of a regular HDD. Let's be generous here, and spare you the metal strain and round that to 4. 4 times lighter actuator arm would need a considerably smaller smaller magnet and a considerably smaller coil. And that's in the case of the rather modest count for only 3 platters. That disk from the article actually has 7. So 14 / 1.35 - that's a whooping 10+ times lighter.
Are you sill on the train of thought?
Now consider a 5.12 inch circle inside a square with a side of 5.25 inch, and the amount of room remaining free in its 4 corners. It goes without saying, the corner space of a 5.25 inch drive will be more than the corner space of a 3.5 inch drive, so what do you think, will you be able to fit a considerably smaller actuator in a larger area? Hint - the answer is yes. And we are thinking in 2D here, don't want to put too much strain on you ;)
Your idea that the actuator size will grow with the disk is a product of your complete failure to understand things in the context I present them, you just can't go out of that box. The actuator of a 5.25 inch drive following the traditional design would only be larger, because the arm assembly would be fused and it will be heavier than that of a 3.5 inch drive. But ultimately, the point you fail to grasp is that the actuator size is not a function of the platter size, but of the actuator arm weight, and a single arm with a relative mass of 1.35 will always be much lighter than 6, 8, 10, 12 or 14 arms with relative mass of 1 which would be in a single assembly respectively for drives with 3, 4, 5, 6 or 7 platters. Maybe now, after it has been explained to you in a matter fit for a toddler, you will finally get it?
And yes, I am well aware that anything, capable of converting some form of energy into motion qualifies as a motor, for example my foot, but still, I prefer to call it foot rather than motor. The same way it is only natural to refer to an actuator motor as an actuator, not a motor, because that's a vague generalization, and would also be confusing, since any layperson actually use "motor" in an entirely different context. And yes, you do strike me as a layperson.
So yes, obviously I do know that the actuator is a type of motor, and obviously, I never claimed to be star hard disk designer. You are resorting to making things up, which further goes to show your actual level of competence. Gonna refer you to your previous post:
"I don't think you know what the actuator is. You are describing the *actuator arm*. That arm doesn't just do stuff, it needs the actuator. That's a motor to actuate the arm."
Seems like you don't know what the actuator is. The HDD actuator is consisted of the magnet, the coil, the coil frame and the arm. So when I say actuator, it implies all of those. In fact, the very paragraph you responded to has listed the steel arm frame, magnet and coil, and yet somehow you interpret that as "talking about the arm". You might want to brush up on your reading and common sense skills :)
"Somehow you find a way do dig yourself into a hole every time you comment on most articles."
If imagining that makes you feel any better - go for it. It is only natural, narrow minded people always feel resentment for outside the box thinkers. Mainstream conformism never ceases to amaze me, especially the feeling of pride associated with it ;) Amazing the kind of things people take pride in nowadays, such as sexual orientation, skin color or being conceptually limited to only what has already been done and being totally ignorant of what could done considerably better.
This Guy - Monday, December 7, 2015 - link
MateCPU's don't scale because data is rarely independent. X depends on Y, Y depends on Z, so you can’t load X, Y and Z into different cores.
Actuators are motors that move something.
One actuator/read-write head assembly takes up around 1/6th of a 3.5” HDD enclosure. You want 80 actuators in a 5.25” enclosure…
HDD's have data tracks, like vinyl records, but far smaller. If you have 2 million tracks per inch then there is 5/10,000,000 of an inch between the centres of each track.
So your HDD read-write head needs to be in a very precise place to read each track. This means every actuator (the thing that moves the read head, steel arm frame, etc.) needs an extremely precise motor controller (the expensive/complicated silicon everyone keeps referring to).
Data tracks run in a spiral shape. When sequentially reading or writing, the read-write head constantly moves, which is fairly easy to control.
If you have four read-write heads per surface but only one data track they would have to jump to the next track every quarter revolution. Critically damping an actuator to move 5/10,000,000 of an inch 21,600 (4x 5400rpm) times each second reliably for 5 years would be an exciting engineering feat worthy of your billion dollar retainer. Making 80 read-write heads move so in a 5.25” package is Nobel Prize territory.
If you have one data track per read-write head, the latency will be the same as if there was only one read-write head. Latency is why HDD's suck so much. Yes you could increase sequential flow, but you might as well just have all four heads on each surface attached to the same actuator (with a complex mechanism to adjust for the different circumference of each track).
Then there is availability. Like others have said, metals expand at different rates when heated so the actuators for the read write heads need to be regularly recalibrated. For this 7 platter HDD (yes, I'm bringing you back on topic), there is only one actuator controlling the 14 read-write heads. Say this system has three 9's availability. Worst case it needs about 2 minutes each day to re-calibrating itself. With your 80 independent actuators your hard drive will be offline for around two hours every day (assuming your design is robust enough to recalibrate all 80 actuators without causing errors).
How are you going to synchronize data between your 80 write heads? Say you have a 3.5 inch disk. The data rate half an inch from the edge will be 28% slower. The data rate an inch from the edge will be 57% slower. How do you synchronise these data rates without adding excessive latency?
So cost. A significant materials cost in a HDD is the actuator. You want 80.
I respect your can do attitude, but innovations in HDDs require very complex simulations of materials, not the lazy management engineering that you, I and the other commenters have produced.
RainDaemon - Thursday, December 3, 2015 - link
ddrive, There are some serious flaws in your thinking. Its pretty clear you don't have any decent real world experience in engineering or business.Existing hard disk technology is bases on decades of research and development. Significant changes in design require a significant increase in investment. In order for this to be viable, manufacturers need to be assured of a return. If you think the great minds behind existing storage technologies haven't thought about the ideas you propose then you are mistaken. There are several technical issues with what you propose.
Firstly, larger (5.25") platters have several major disadvantages. While they will have a reasonably higher capacity, performance is negatively affected. Larger platters require more power, produce more noise and vibration and this need to operate at a lower RPM. This increases rotational latency which impacts performance. Furthermore the increase in the size and mass of the actuators will impact their operating precision, increasing seek times. Larger parts are also more heavily impacted by thermal stresses, which has an impact on the density you can achieve. These drives will also require more materials to construct, be more expensive to build and heavier, increasing things like shipping costs.
Secondly, having multiple actuators in a drive, while a novel idea, doesn't hold up so well in the real world (it has been tried, several times) There are several issues:
- They take up significant space. Assuming your maintain the existing form factor, this will shrink the usable storage area inside the drive. Unless you're going to invent a whole new form factor, this is not viable. (you can have a 3.5" platter with 2 actuators in a 5.25" form factor - this has been done commecially)
- They have a major impact on the cost of the drive. We're talking about a huge increase in the number of moving parts that have to be manufactured and assembled. Additional hardware required to drive the actuators has to be included. Complicated firmware has to be written. Optimizing access patterns for one set of actuators is difficult enough. Again, material costs increase significantly. Any hypothetical increase in performace is negated by the cost alone.
- Heat, power, vibration. More moving parts will have a negative impact on reliability of the drive. (Your argument of redundancy does not consider all potential failure modes.) These are also expensive problems to solve.
- The basic physics that hard drives deal with (and this is really the biggest issue with this idea) A read-write head has to deal with a lot of thermal stress. The platters, the actuators and the heads themselves undergo expansion and contraction significant enough for it to have an impact on performance. Hard disks deal with this by encoding "servo" data in the platters that are calibrated to the head assigned to it. Since the platters and the heads are not perfectly homogenous, this data varies from head to head and platter to platter. The issue is also compounded by the density of the platters (the smaller the tracks are, the greater the impact of expansion and contraction) This principle makes it impossible (or at least extremely difficult) to assign multiple heads to one platter. Of course you can mitigate this by trying to create heads that are all EXACTLY the same and platters that are perfectly homogenous, but this is extremely expensive. More moving parts further magnify this problem by creating a more thermally dynamic environment within the drive.
- Another physical aspect is that the actuators can interfere with each other. If they are moving independantly, they make microscopic changes in the density of the medium inside the drive, as well as vibration. This has a significant impact on the accuracy of tracking and increases seek times.
ddriver - Thursday, December 3, 2015 - link
Yada yada yada, I've already addressed pretty much all of your points in other posts, save for the actuator "crosstalk", which is a valid issue, but nothing critical. It will only take a few seconds of profiling per assembly to measure it and create a dedicated profile for the particular HDD unit to compensate and normalize it. This is for EM interference, as for mechanical - since the actuators are independent, they will be individually lighter and influence the entire device to a much lesser extent than the single heavy fixed multi-head actuator of a regular HDD. As for actual actuator collisions - I've ran range of motion simulations, even SIX actuators per platter face are doable, but will add to the form factor. 4 are doable in standard 5.25" form factor. There are two ways to go about the actual actuator design, there is a cheaper one, which would be computationally intensive on the firmware, and a more expensive, which would require production of 2 to 3 slight shape variations - nothing much really.5400 RPM 5.25 inch HDDs were possible 20 years ago. I am quite sure this is still technically possible today. Frankly, with independent multiple heads you don't need more, 5400 is ample. Low RPM and larger platter diameter are a problem only when you have a single actuator to service the device. Even only 2 heads per face at 5400 RPM will provide equal or better performance than 1 head at 10k RPM in every possible performance metric.
The firmware is not that much of a challenge either, nor its implementation, which should take no less than 6 months for a SINGLE decent firmware developer - everything from scratch, nor will it require any exotic, custom MCU design, I reckon a stock Cortex R7 would suffice.
RainDaemon - Thursday, December 3, 2015 - link
It would be really amusing to see you try and apply your claims in the real world. You've made so many exaggerated comments without a shred of evidence supporting your claims. Your claim of "a few seconds of profiling" in particular is evidence that you are talking out of your ass. You can make claims of how an ideal system would work, but things are different in practice. You are not talking about a static system, but a dynamic one. Components are not perfect, the have flaws and tolerances. These kind of things compound with complexity which is essentially what you are proposing.If you really think your claim isn't absurd post some hard data on what such a system would cost and how much power it would use.
How about also explaining how on earth you are miraculously going to end up with lighter actuators? (If you could just magically have lighter actuators, why wouldn't current drives embrace the idea to save material costs? What's the trade off?)
How are you going to address the added complexity of assembly? The fact that your production costs are going to increase significantly? The cost of more expensive materials?
What about the servo data? Are you going to write servo tracks for each head?
How are you planning on dealing with heat? Turbulence? Vibration? You haven't addressed any of these points?
Do you really think one firmware programmer is going to be able to develop a decent solution in 6 months? You're aware the industry has billion dollar companies that have spent decades analyzing real world applications to optimize firmware for drives in various applications?
Your claims are preposterous. How about a little substantiation? You speak of "simulations" involving configurations of 4 actuators, how about a technical drawing?
You talk about this stuff as if you snap your fingers and it just happens. Do you actually have any industry experience or are you just making stuff up?
All these points are pretty moot as your entire argument is predicated upon a hypothetical performance increase your system would have, despite the fact that this is flawed thinking. Your over complicated hypothetical unit will get trounced by an entry level disk in terms of unit cost and bang for buck.
ddriver - Thursday, December 3, 2015 - link
Gimme a billion dollars and legal protection from patent trolling and I will show you.You ask for hard data - that would require at least operational prototypes. I refer you to the previous point. I could provide you with simulation data, but you will have to pay me to develop that, it will cost you 500k, you will have your results within a year.
No magic - it is simple and obvious, and quite astonishing you still don't get it - current HDDs combine the arms for all platters in a single assembly, thus logically, it is much heavier than the individual arms on their own. n>1 count of arms will always be heavier than 1 arm. DO'H
HDDs are assembled by robots, robots don't care whether they do something once per HDD or 100 times per HDD.
The actuator synchronization markers are on the platters, they can be used by any number of actuators.
Heat conduction, vacuum, not gonna be an issue - wasn't 20 years ago, won't be today.
Yes I do, and I did not say 6 moths, I said less than 6 months. The billion dollar companies are full of slackers.
Range of motion simulations are children's play. If you can't set up a disk with 4 moving arms around it and check if they can move along along the disk radius without touching in any configuration, you have no business questioning my competence.
I have 20 years of experience in software, electronics and mechanical engineering. I haven't been in "the industry" though, I am more of a "custom shop" guy.
There is nothing hypothetical - if a single head can do X, then N heads can do N * X. The challenges are there, but I don't see anything that would qualify as an obstacle, nor have you nor any of the naysayers provided any factual evidence of such. You keep asking about "evidence" that it is possible, but each component of that system already exists and has decades of mature tech behind it, there is no reason why it shouldn't work, if anything, you should be providing evidence why it shouldn't work, and I mean tangible facts, not that drivel. You present a number of points you believe are going to be problematic, but not even a word on why would they be problematic. Where is your shred of evidence? Being conceptually limited to only what has been done so far does not speak in favor of your competence. If everyone was like you, we'd still be living in caves and wearing animal hides for clothes. You sound like a mainstream evangelist, you probably believe in ridiculous pipe-dreams like manned missions to Mars or asteroid mining, and yet have such a problem with a concept which has all its requirements already met technologically.
weissPC - Friday, December 4, 2015 - link
@ddriver - there are a few people in the HDD industry that's replying your thread. You have no simulation data because you are asking people to pay you to develop it. You are asking for arbitrary amount of money (1 billion dollars) to 'show' us how you do it. Even kickstarters won't give you that amount of money, much less HDD companies.Your simple hypothesis that "if a single head can do X, then N heads can do N * X", even with something non mechanical like CPU cores, you know having double or quadruple the number of cores do not mean 2x or 4x the performance, having more heads per surface won't solve the problem, made worse by today's high densities in terms of track spacing and variation between head sizes and performance makes it impossible to do what you think you could do.
What makes you think the data written by one head can be read by another head? To allow for these variations so the heads can read data written by their counterparts, you have to make track spacing much wider and make the heads to perform at lower than what they are capable of, negating your so called increase in capacity. In the end, your 5.25" platter may have similar capacity to a 3.5" platter or worse, you'll find that it just doesn't work.
Even Steve Job's reality distortion field don't work all the time.
ddriver - Saturday, December 5, 2015 - link
"What makes you think the data written by one head can be read by another head? "What makes you think it can't?
"Your simple hypothesis that "if a single head can do X, then N heads can do N * X", even with something non mechanical like CPU cores, you know having double or quadruple the number of cores do not mean 2x or 4x the performance"
CPU cores share resources, not all workloads are CPU time bound, you are obviously quite ignorant to even make that comparison. In CPU intensive tasks, minimizing the strain on the functionality shared by the cores, test results actually show close to perfect scaling, but you are obviously not aware of that either. Multiple heads can actually scale better than 100% - since they will decrease latency and eliminate a lot of the seek times. For example, a single head reading from one location on disk and writing to another would have to travel back and forth, so its throughput will be split between the two tasks, and moving between the two will be a substantial overhead. Two independent heads can do 2 tasks at their full throughput and they won't have to waste ANY time seeking.
With multiple heads, even if the head count is higher, individual heads and their arms are much lighter, so even if the vibrations they produce are higher in frequency, they will be lower in amplitude than the vibrations produced by the heavy arm assembly of a traditional HDD. Naturally, and for someone with a shred of competence it should go without saying, but since you lack it, actuator drivers can use ease in and ease out to reduce vibrations to non-existent, something a drive with multiple heads can afford to a much larger extent than a traditional HDD actuator, which can't afford to lose precious time since it is the only one servicing the device. So your point about increasing track spacing entirely wrong, and such a device will inevitably end up producing much less vibrations, much less noise, and may even allow denser tracks than a traditional HDD.
The 1 billion is an approximation with a safe margin, if it makes you feel any better, I can give you a less (or more) arbitrary number, for example 987563, is that better? I have done range of motion simulation, which as I already said is trivial, the 500k I asked for a product simulation involves all the mechanics, electronics and firmware. This is a significant investment of effort, it is quite silly of you to think I have made such just to have them lying around ;)
Your belief that the "industry knows best" is ridiculous. You obviously have no knowledge in any of the fields involved in product design. Just to give you an example - yesterday a washing machine died - a whirlpool unit, from a company with long history of making such products. The culprit - the ceramic capacitor they used in lieu of a transformer to implement the PSU for the electronics. They used a capacitor rated at 240V for a product designed to operate on 230V line - practically no safe margin, resulting in a ticking timebomb, ruining an otherwise still operational device. A 400V capacitor with the same capacitance costs a mere 29 cents, only 6 cents more than the one rated for 240V, but would have lasted until some more significant component of the machine has died, and yet they did not use one. The industry knows best? Yeah right, and I don't say the engineers didn't knew all this, it is likely they did it on purpose, and they have likely calculated the capacitor to die just about the time the warranty runs out, because the industry, even if it does know best, doesn't care for the best, it cares only about profit.
Finally, you obviously have no idea of the extend of my knowledge and skill set, you demonstrated profound lack of technical knowledge, profound inability to understand simple logic and common sense, and on several occasions you failed miserably at trying to sound smart - something you'd realize had you actually been as smart as you try to pretend to be.
ddriver - Saturday, December 5, 2015 - link
And that example with the washing machine is just one of the many cases I've seen the industry spew out lousy products, and anyone with a decent amount of knowledge in the area would notice that too.Almost 10 years ago, I built my own smart oven, with the ability to automatically control the position of the top and bottom heating elements, which were on their own compound and could be activated in different patterns. It could also operate on hot air alone using an additional heater, and could program a temperature curve to follow with time, remote control and remove observation via a webcam. The industry has only just began selling smart ovens, and they come with nowhere nearly the set of features my own design had a decade ago.
So pardon be by not be impressed with what the industry does and how it does it, in many aspects I know things can be done better, and in some - as long as I had the resources, I've already done better.
weissPC - Friday, December 4, 2015 - link
RainDaemon's points are valid while ddriver's are mostly hypothetical. ddriver obviously have no idea the amount of code groups of firmware engineers have to write to not only control the actuator arms, but to interface with SATA or whatever interface you now have, to do many other background stuffs that you have no idea of and simply calling them slackers show how idealistic or out of touch you are. And quoting less than 6 months, just seals it.